07-未来板-双足机器人
项目介绍
本项目采用未来板搭配robobit扩展板完成一个会做操的双足机器人
项目将包含以下3个功能:
- 机器人的行走动作以及简易的舞蹈
项目要点:
- 舵机的调试以及舵机角度的选定
项目清单
| 材料 | 数量 |
|---|---|
| 未来板 | 1 |
| robobit扩展板 | 1 |
| robobit塑料底座 | 1 |
| 18650锂电池 | 1 |
| 2KG舵机 | 2 |
| 9G小舵机 | 2 |
| 积木件 | 1套 |
实操步骤
步骤概况
- 第一步:搭建机器人
- 第二步:编写机器人运动程序
第一步:搭建机器人
参照如下pdf搭建说明书进行
未来板-双足机器人.pdf
第二步:编写机器人运动程序
通过调试舵机角度,以下是官方给出的3套动作的子函数编写示例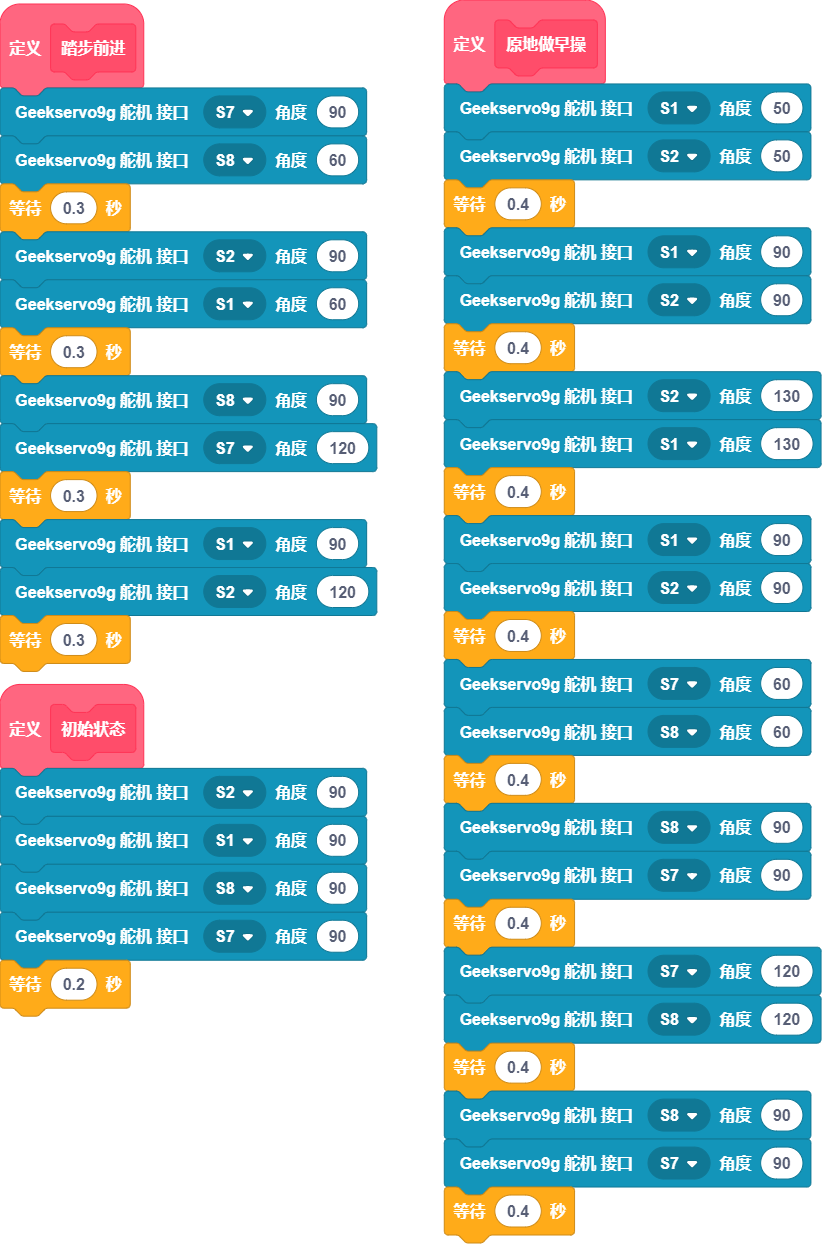
在主程序中调用即可,完成后将程序上传到未来板查看效果
危险
如果机器人没动,检查是否Robotbit的电源没打开!