1-机械组装步骤
套件资料包,购买套件的用户请联系我们淘宝客服进行索取
套件内含物料:
由于左上角的塑料盒装的太满了,最新已经更换更大的纸盒,请注意~
由于塑料盒装的太满了,已经更换更大的纸盒,请注意~


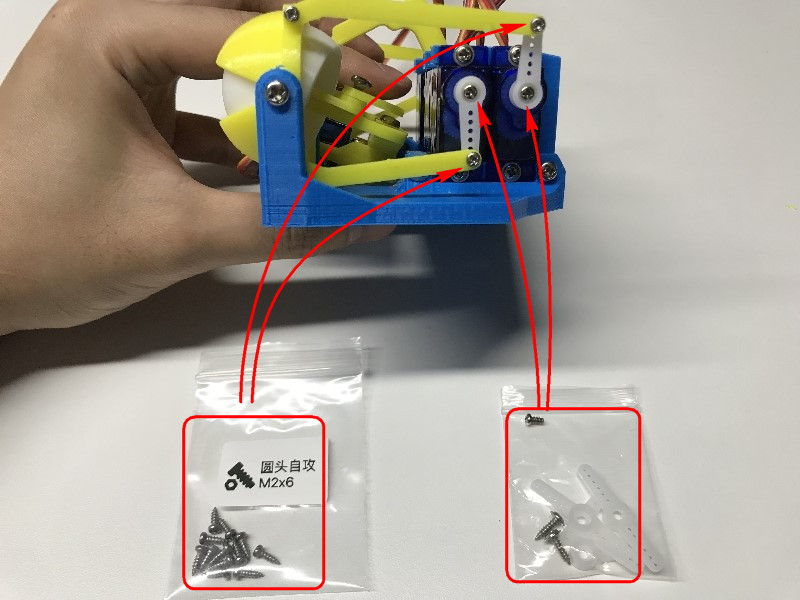
开始组装

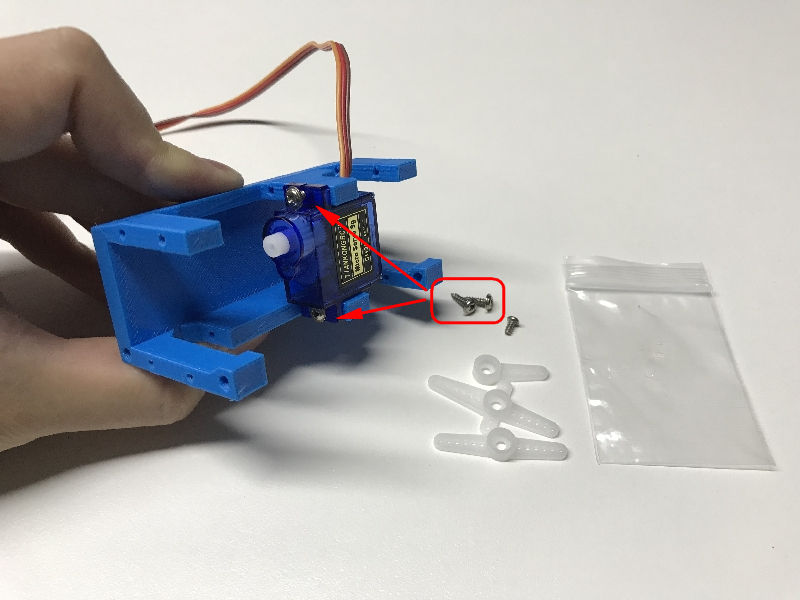
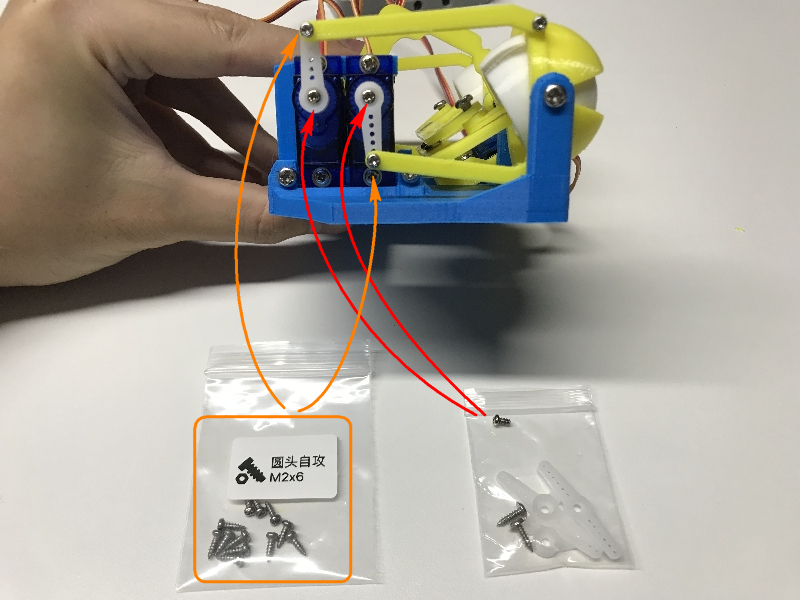
其余的舵机安装方式类似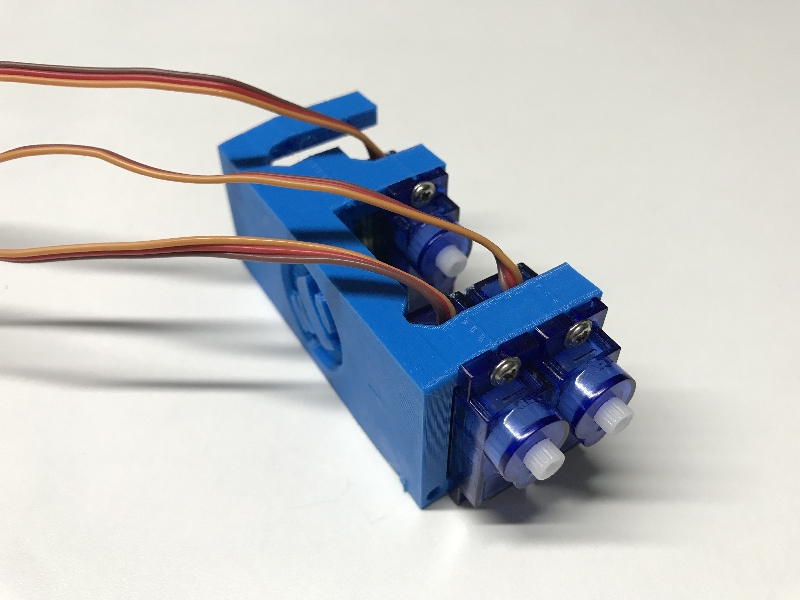

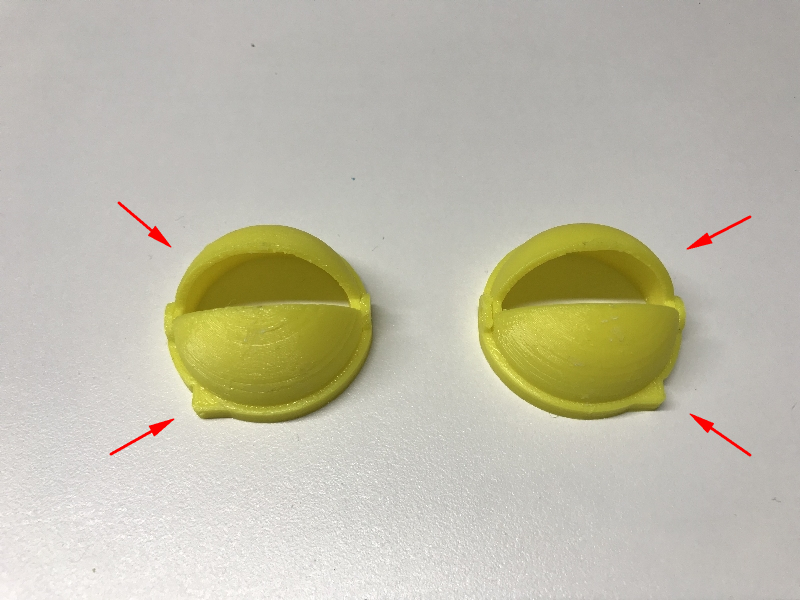
因为套件用的是3D打印件,若有毛刺,请自行用小刀清理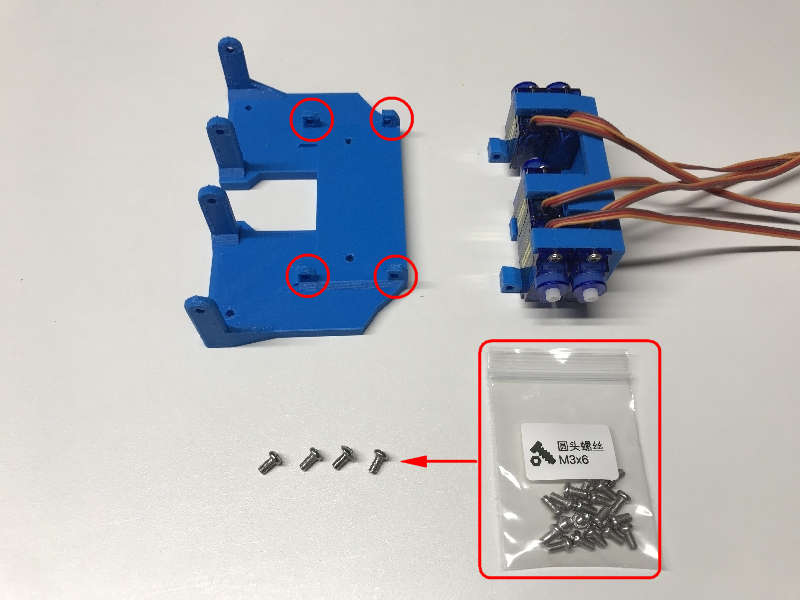
另外一侧同理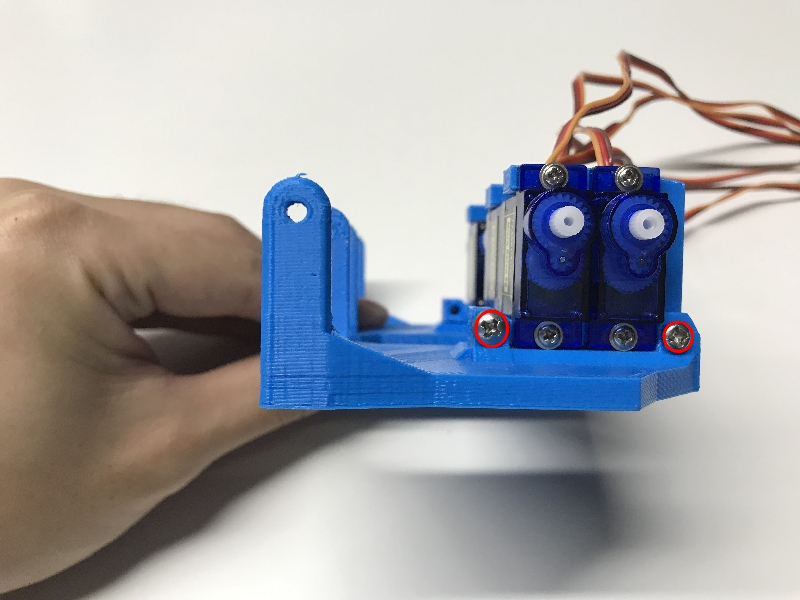
这两个螺丝不要完全锁紧,需要让黄色结构能自由转动。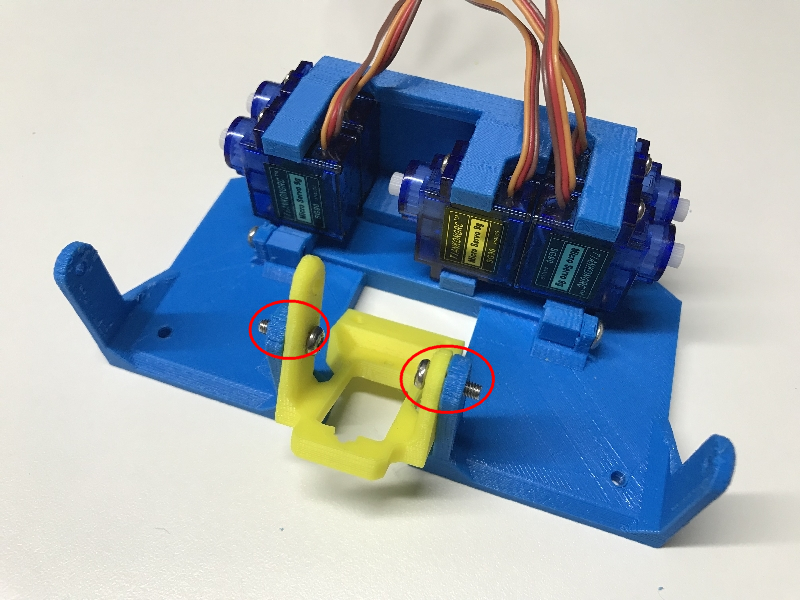

注意舵机的方向!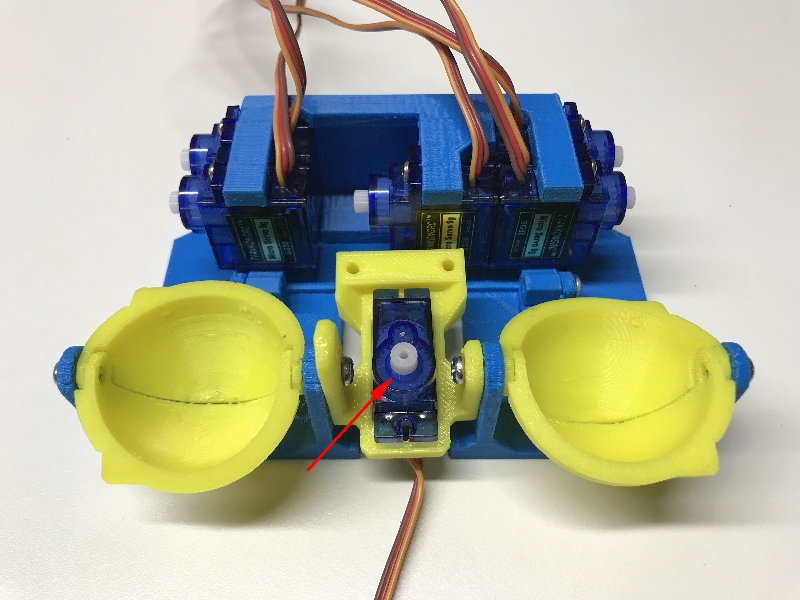
眼珠子自己涂黑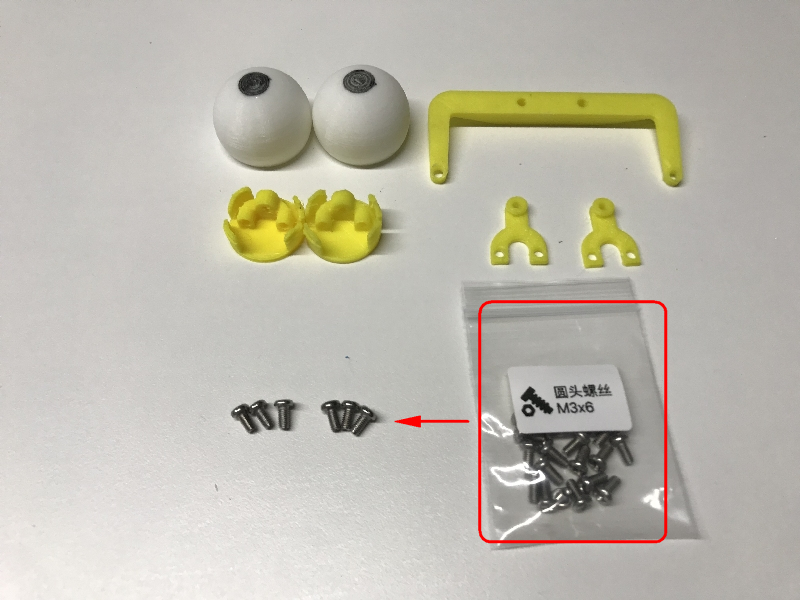
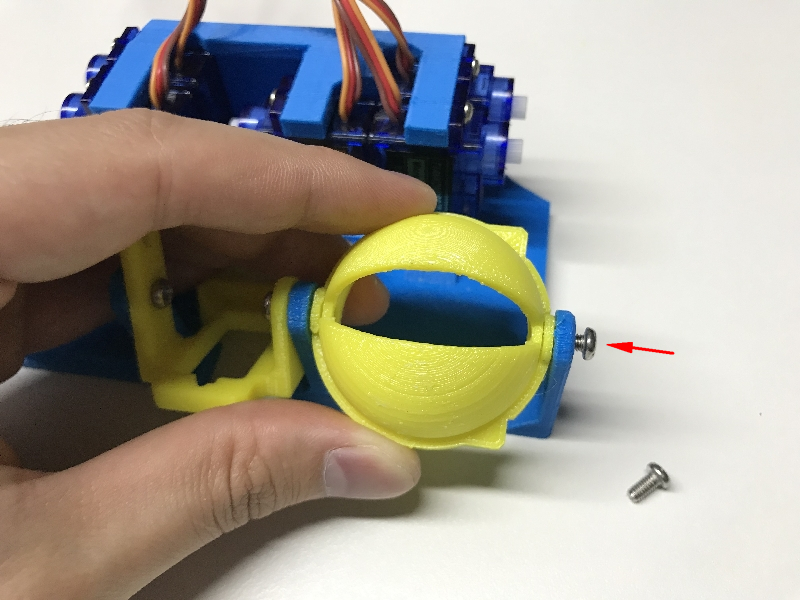
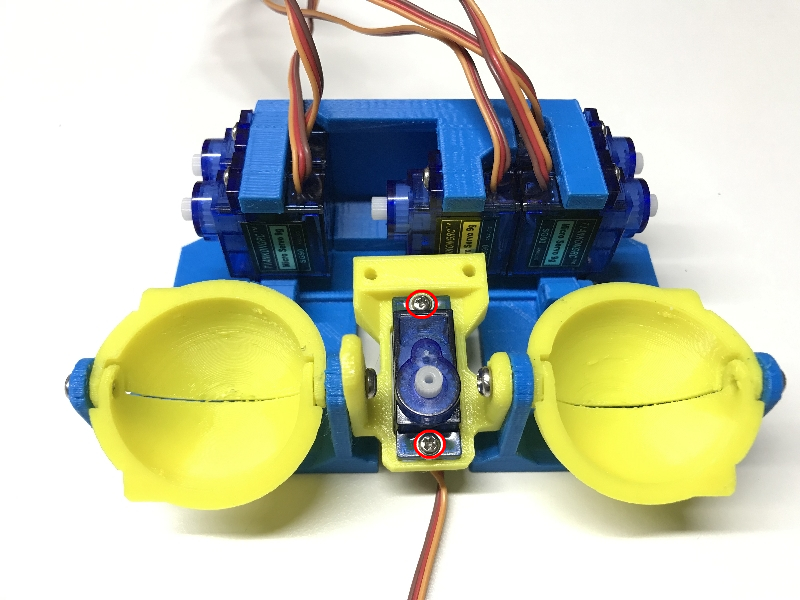
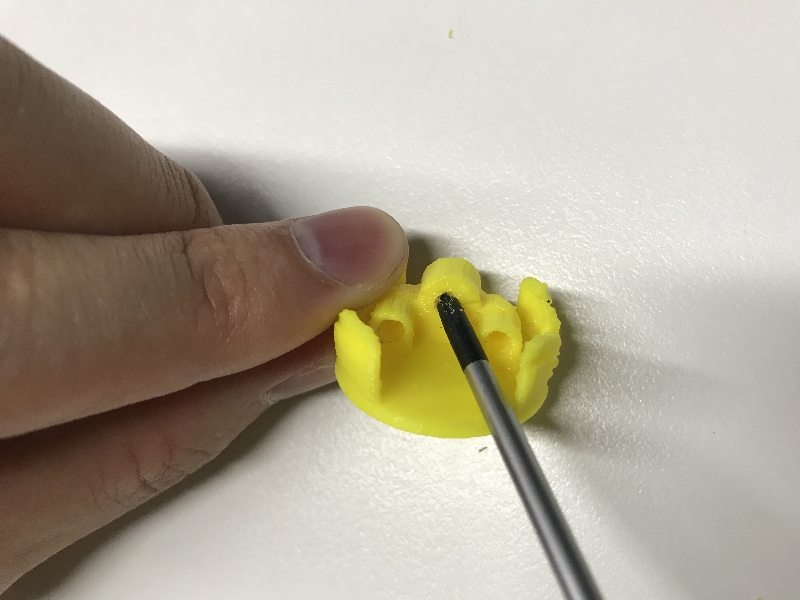
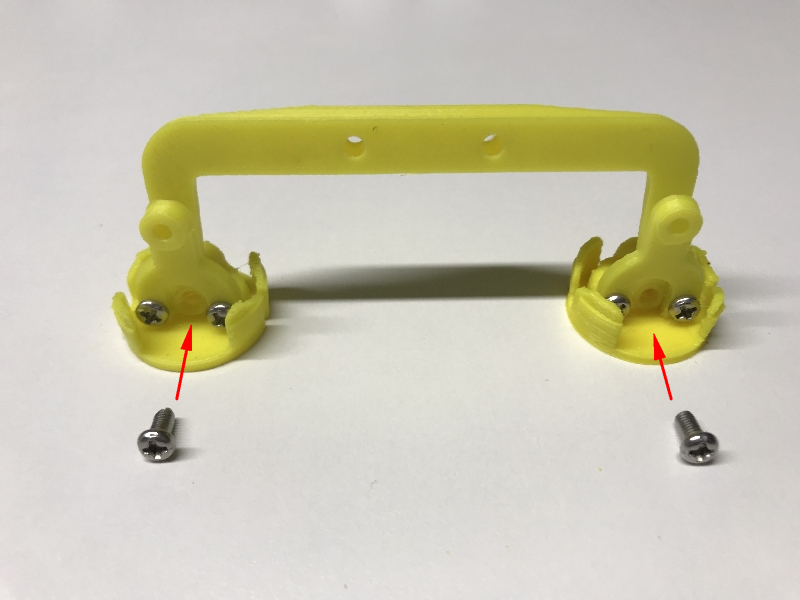
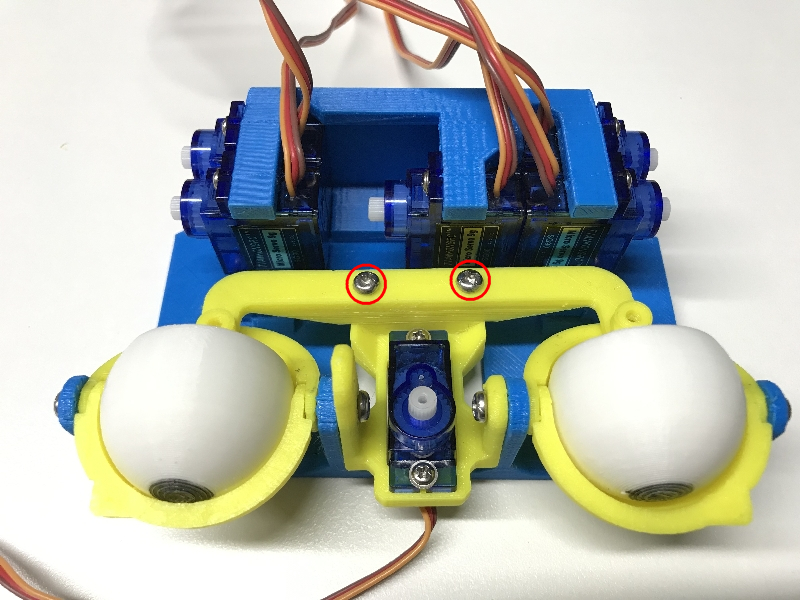
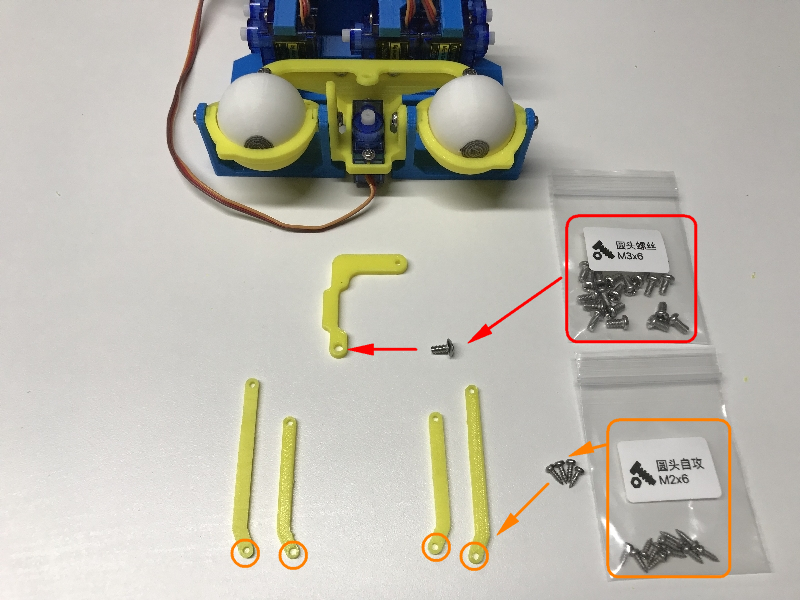
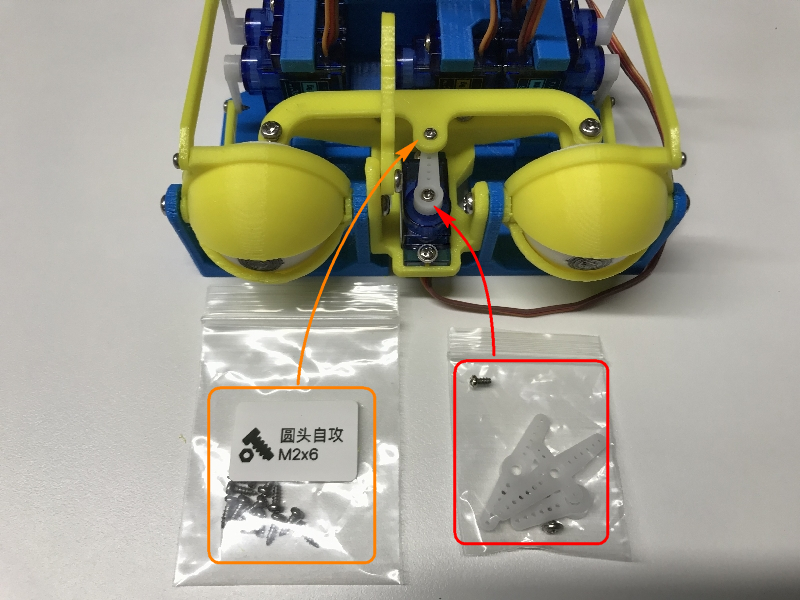
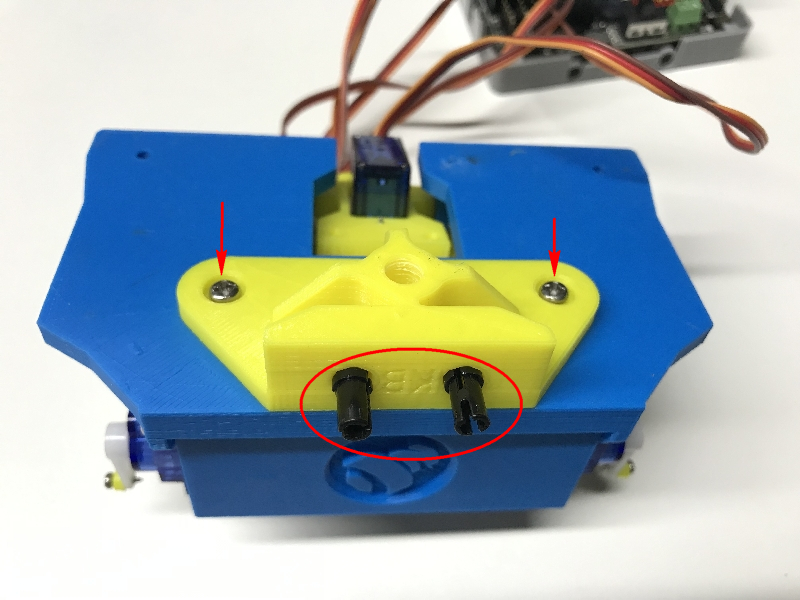
此处安装需要注意,螺丝需要预拧一部分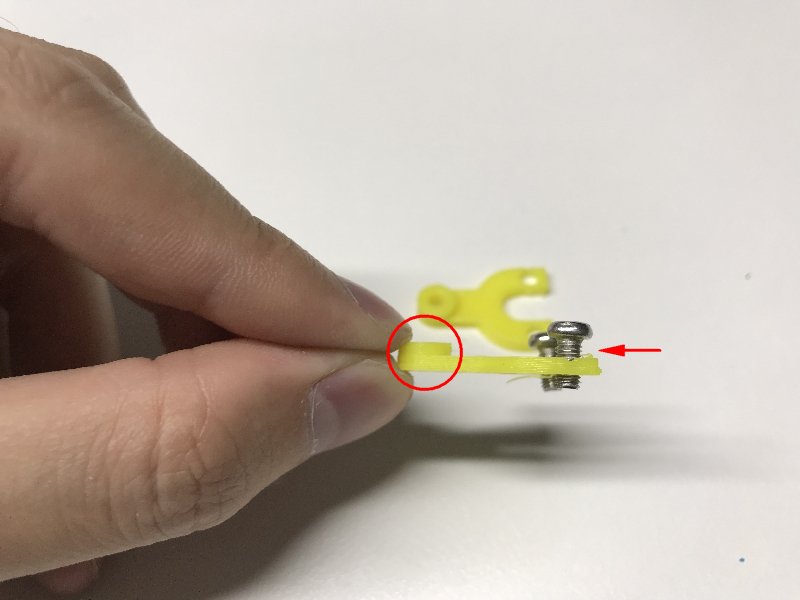
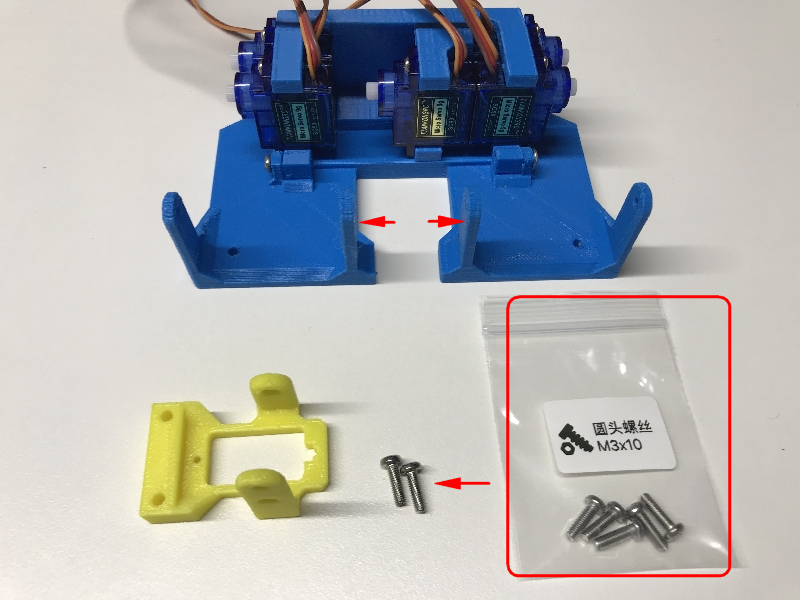
用螺丝刀的尖头稍微钻一钻打印件的三处位置,去除边缘毛刺,方便下一步的螺丝安装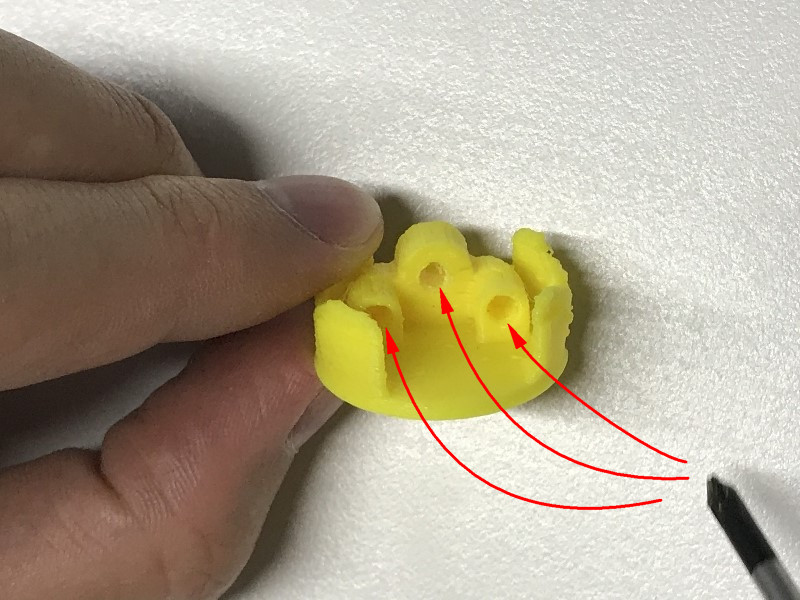
调整螺丝,把Y字结构放入后,在再用螺丝刀锁紧。另一个安装方法一样,此处结构比较紧凑,螺丝刀要打斜拧。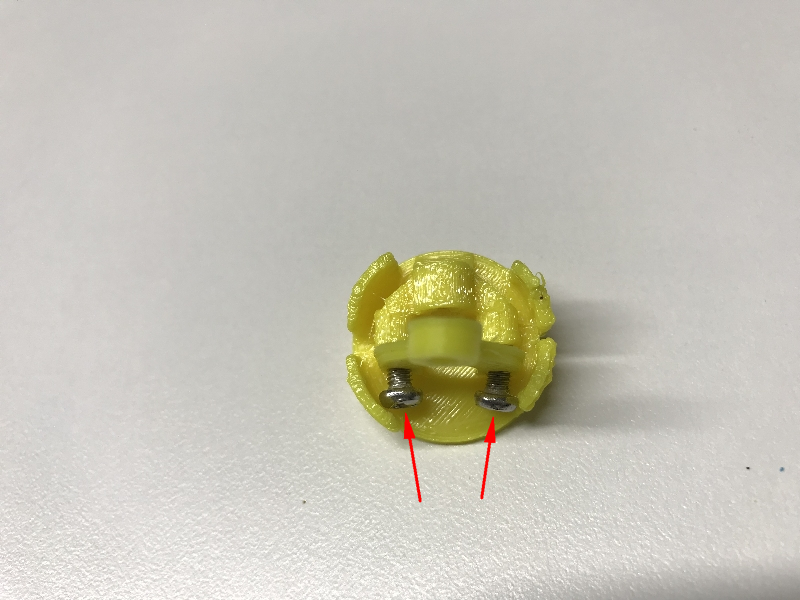
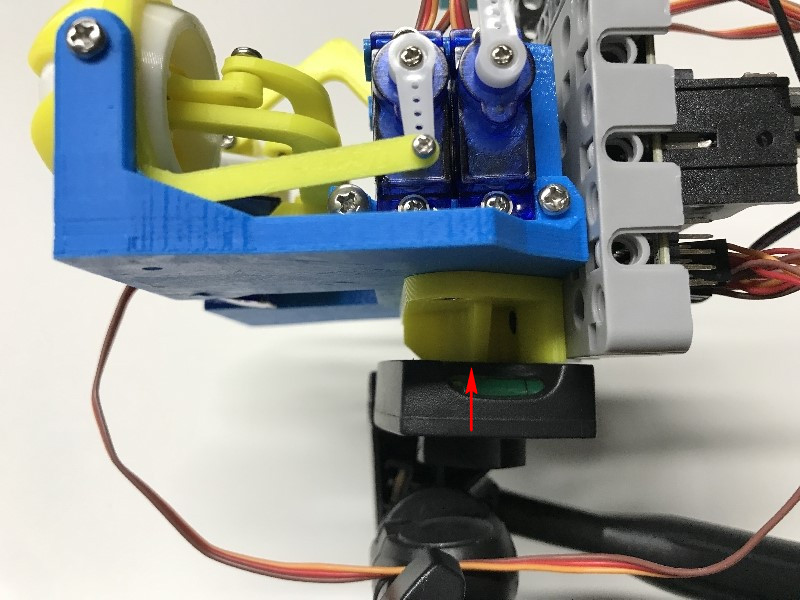
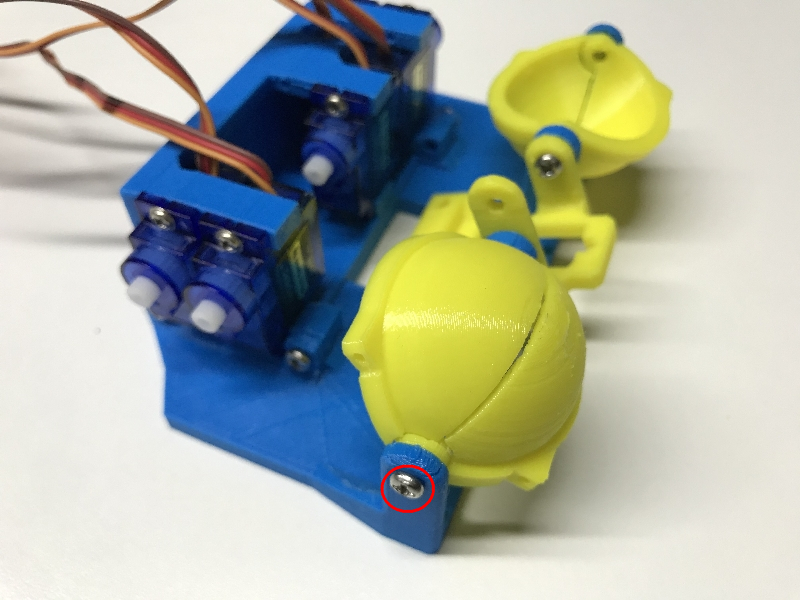
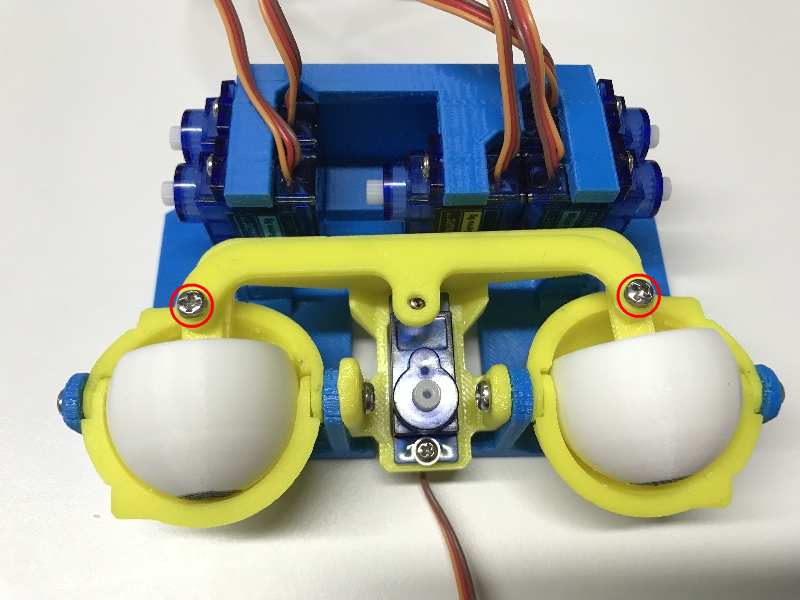
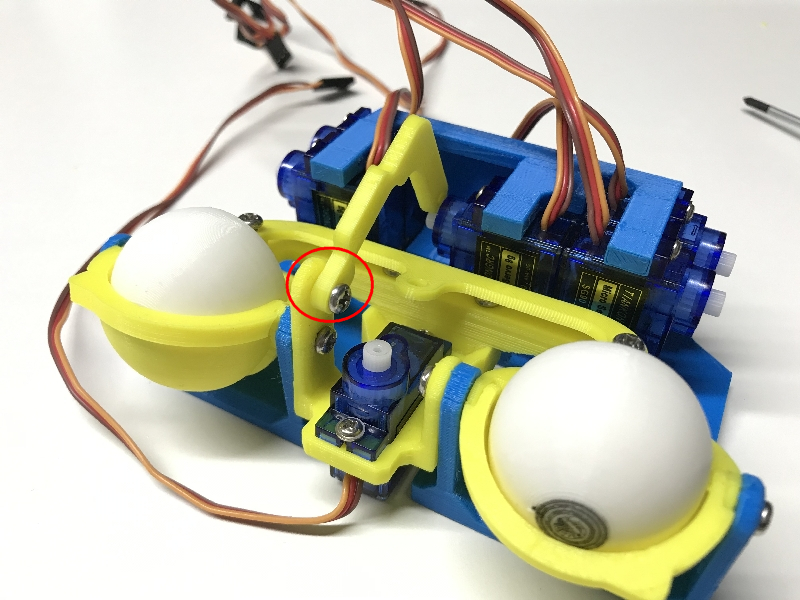
下方红色标注的螺丝不要完全锁紧,让结构能左右移动(最终是眼珠子能左右转动)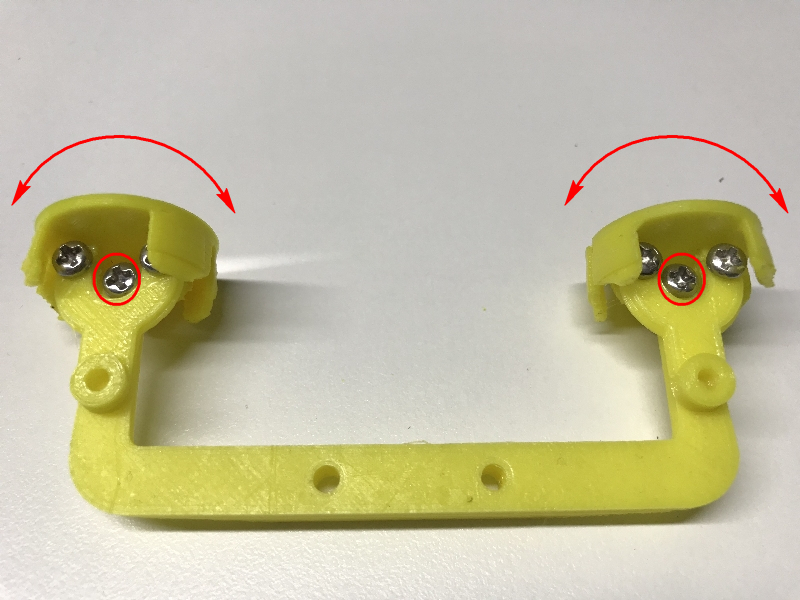
注意白色眼珠突出的结构,与黄色的缺口恰好对应。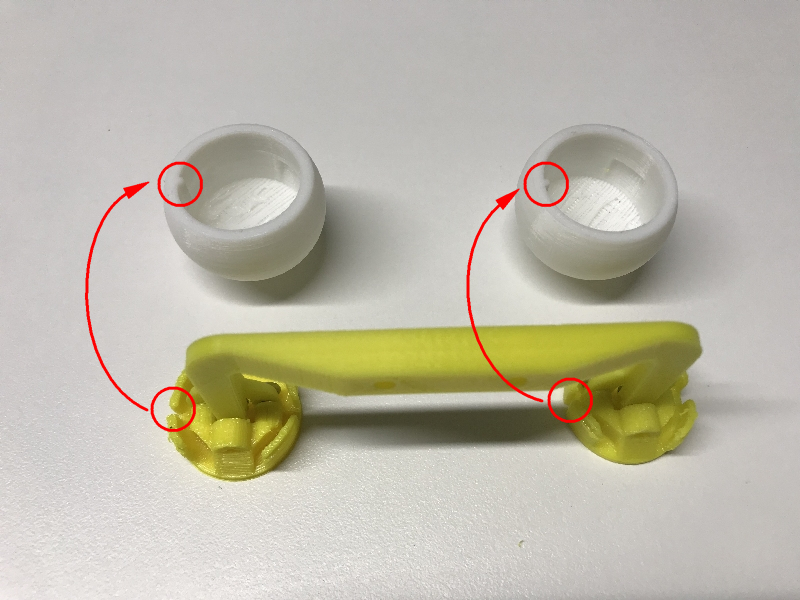
安装此结构需要小心,若感觉阻力非常大,可在装配前,用小刀将黄色结构的四周毛刺稍微削掉一些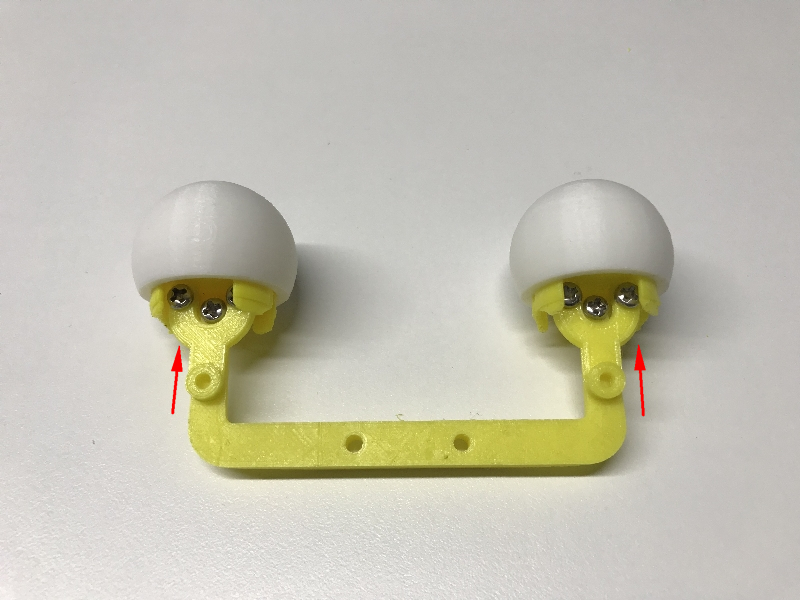
眼珠与黄色结构完全装配好
眼珠与黄色结构完全装配好

注意摇臂的方向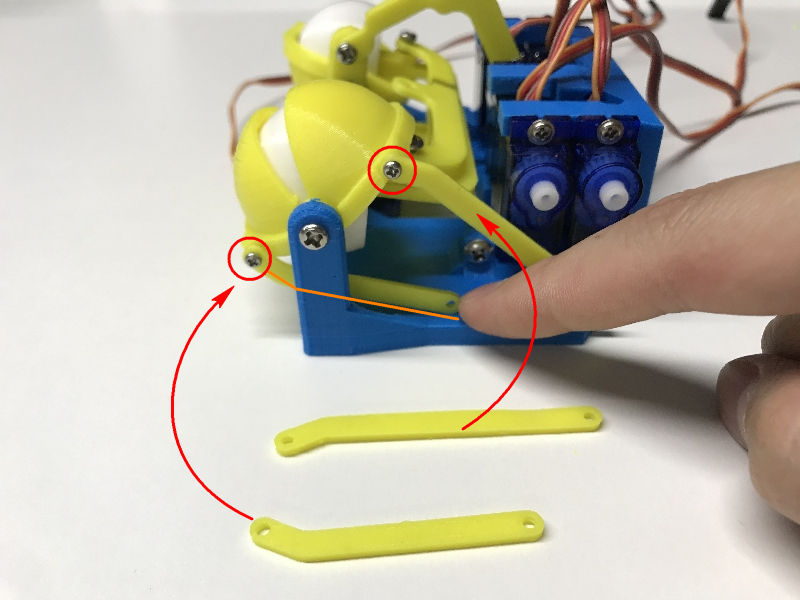
舵机接线
根据图示,将6个蓝色小舵机的结构按照S1~S6分别接到电路板对应的S1~S6
并把18650电池装上(注意电池正负极)
收到的Robotbit可能有两种版本,V2或者是Edu版本,但它们的舵机接口完全一致,按照图示颜色对应接即可。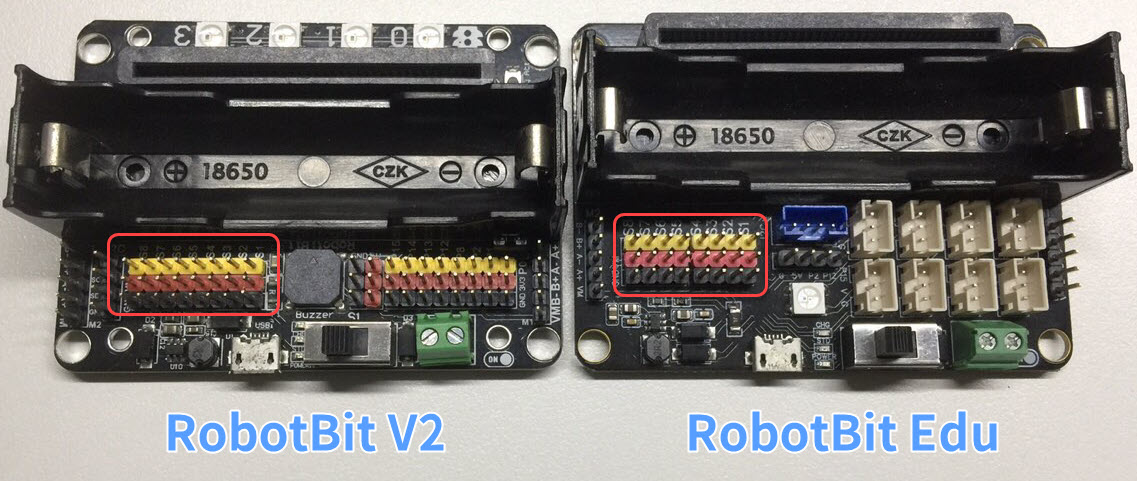
此处如有疑问,可观看配送资料包中的视频:
人脸追踪舵机接线视频(这里V2为例,Edu接法也一致)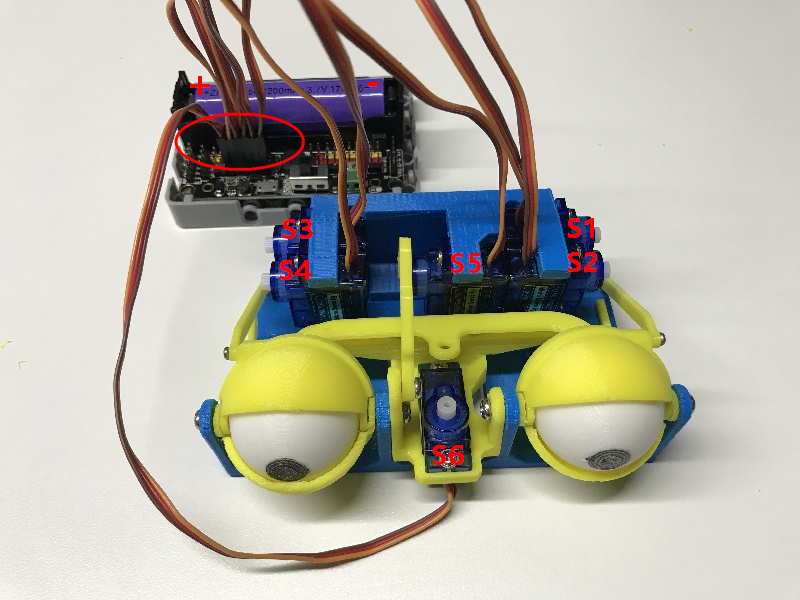
注意舵机的线序,从左到右分别是棕、红、黄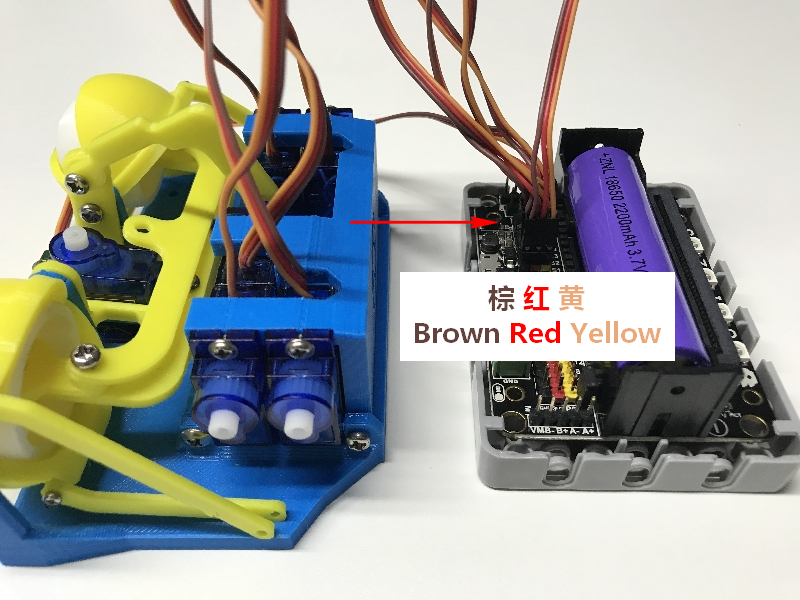
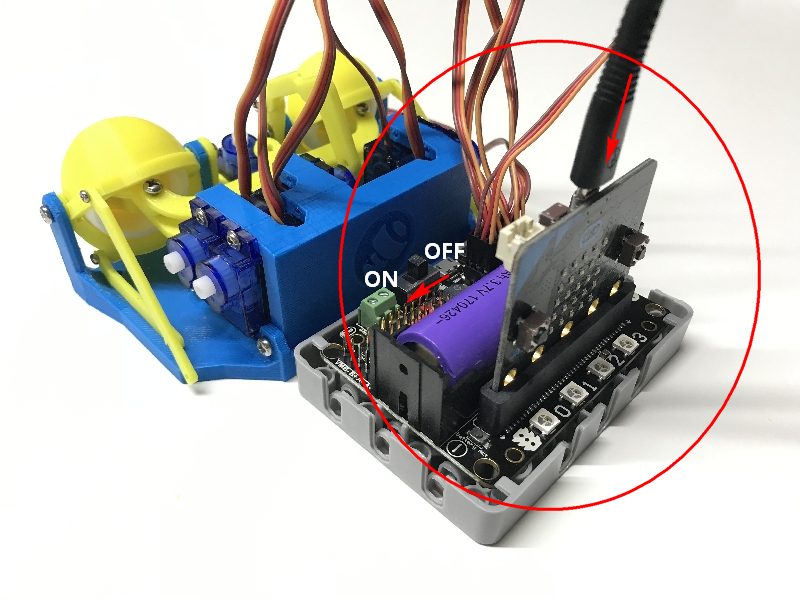
下载舵机归零程序
插上Microbit,插上USB数据线,打开扩展板的开关(把开关拨到ON那侧),把程序“microbit-Servo90Reset .hex”复制到Microbit的U盘上,下载完毕后,拔掉数据线。
“microbit-Servo90Reset .hex”此程序控制6个舵机复位到90度。程序下载完毕后,可以听到舵机一瞬间转动的舵机声音。
此处如有疑问,可观看配送资料包中的视频:
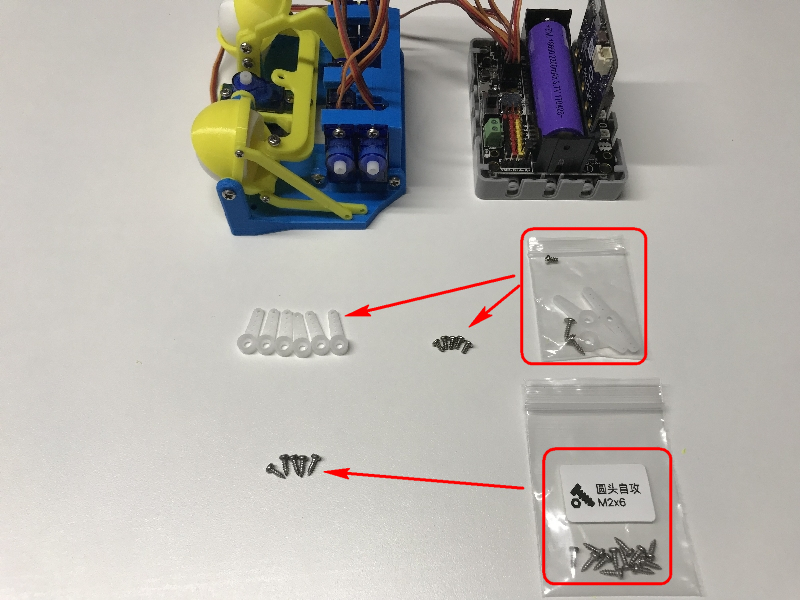
下载程序,安装摇臂

组装舵机白色摇臂
安装摇臂,请确保你的舵机归零程序已下载!舵机已经转动到90°的位置上
安装摇臂,6个白色摇臂都为接近90度安装(如果达不到90度,后续可以通过程序进行微调,禁止掰动摇臂)
此处如有疑问,可观看配送资料包中的视频:

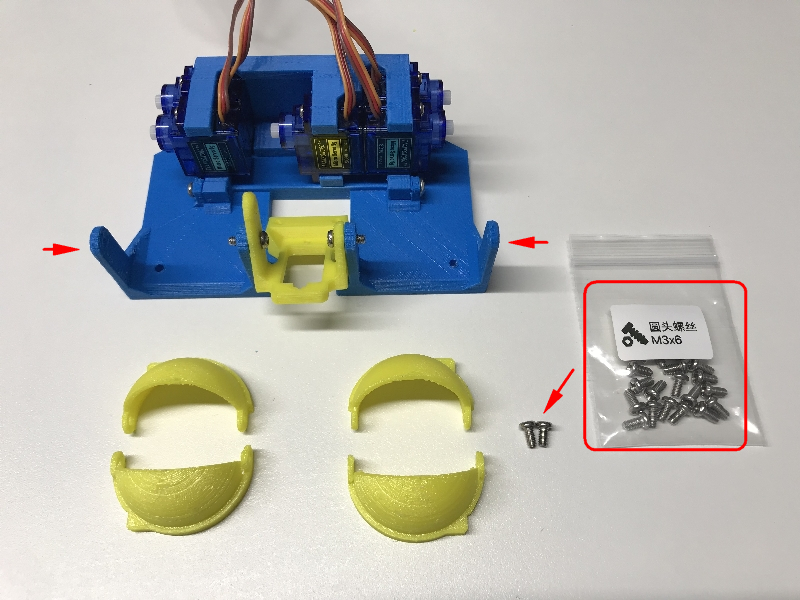
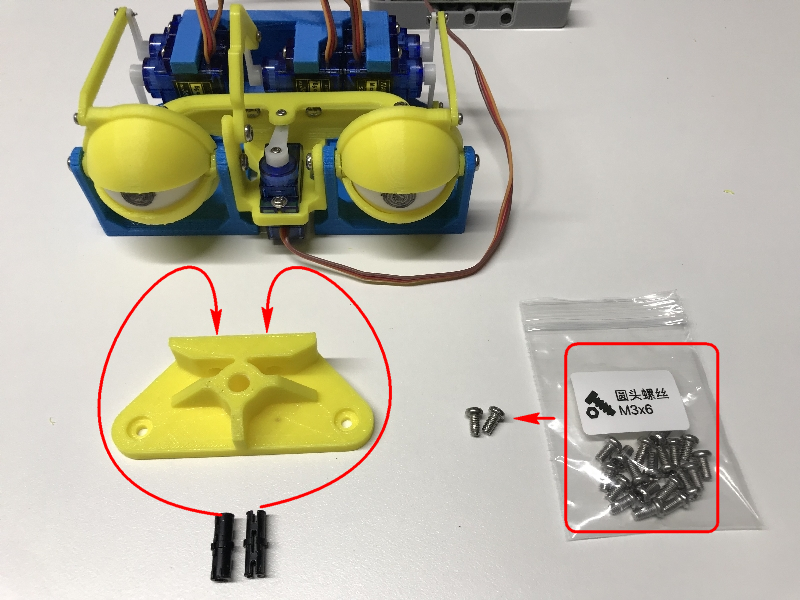
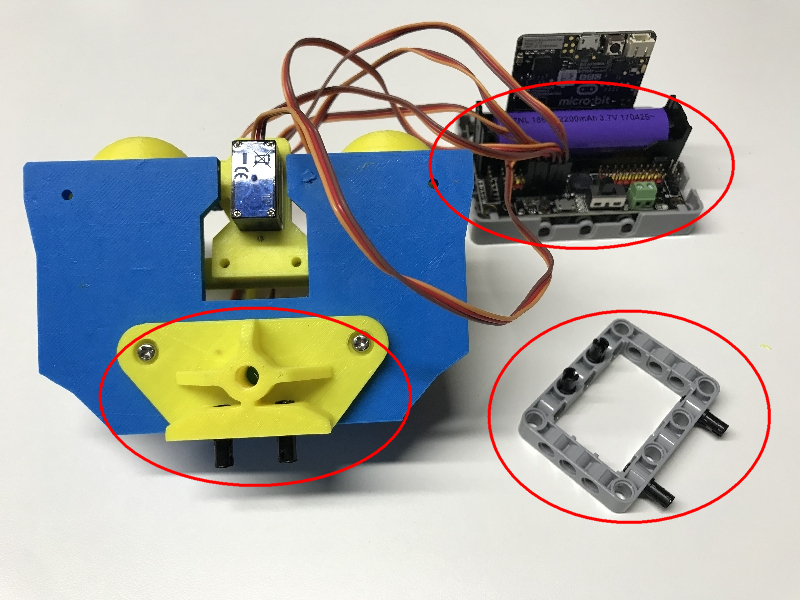
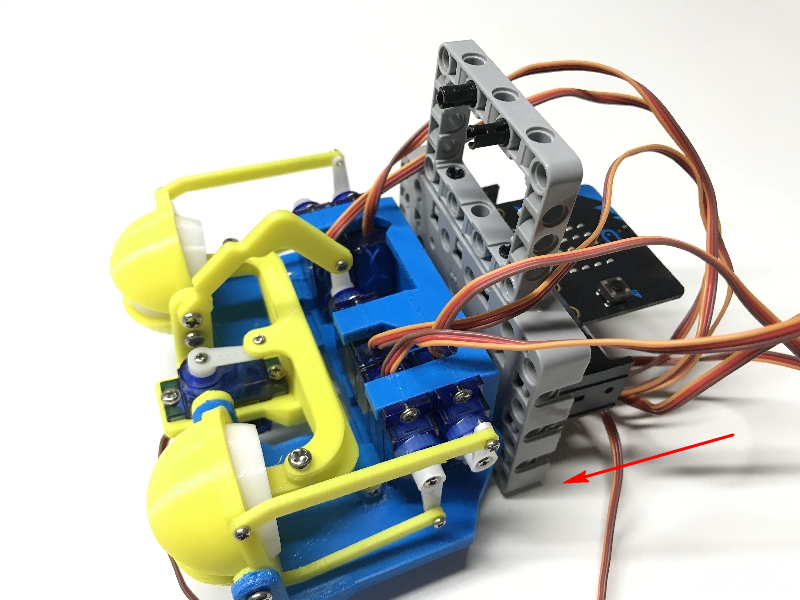
安装连接件
KOI人工智能锦鲤模块接线
#针对**Robotbit V2** KOI接线方式
注意插接线序,非常容易接错!接好请再三进行检查!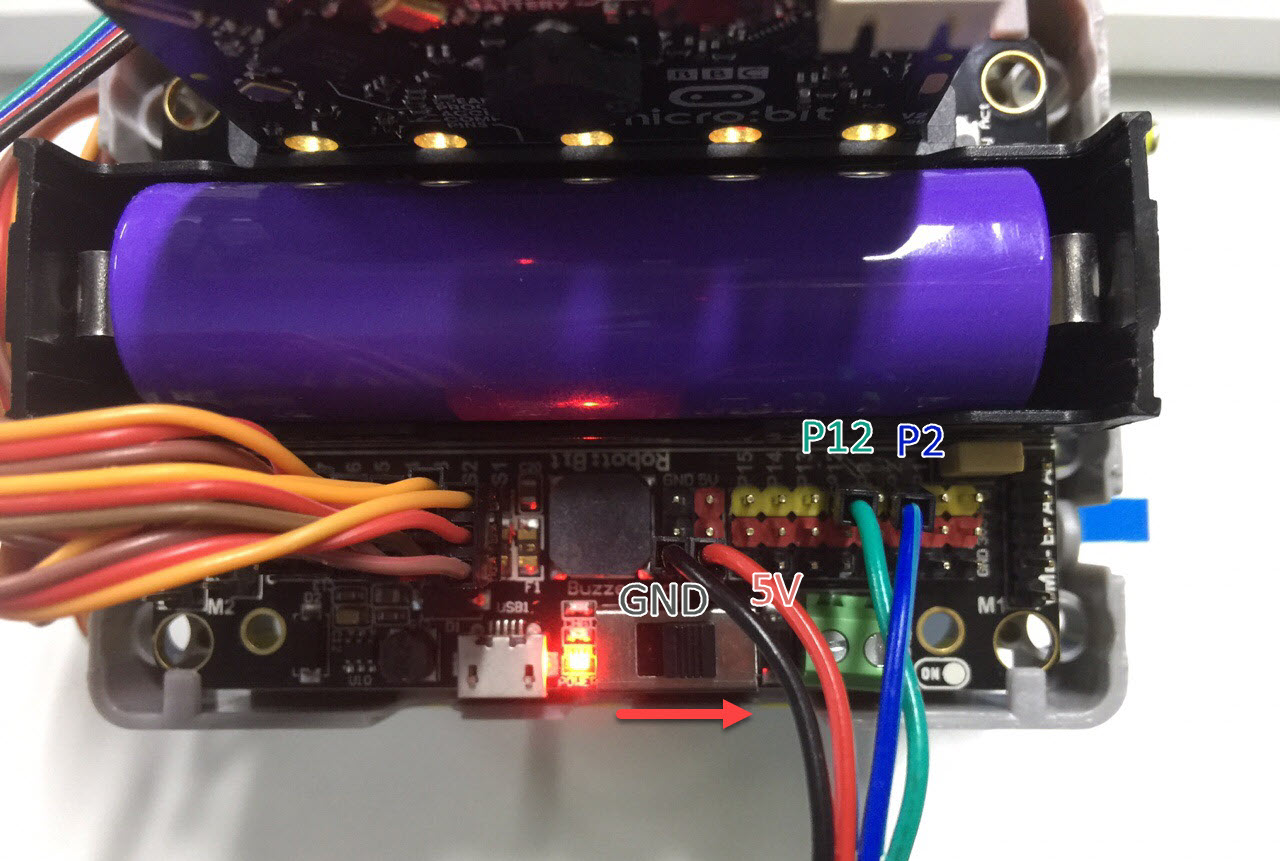
#针对Robotbit Edu KOI接线方式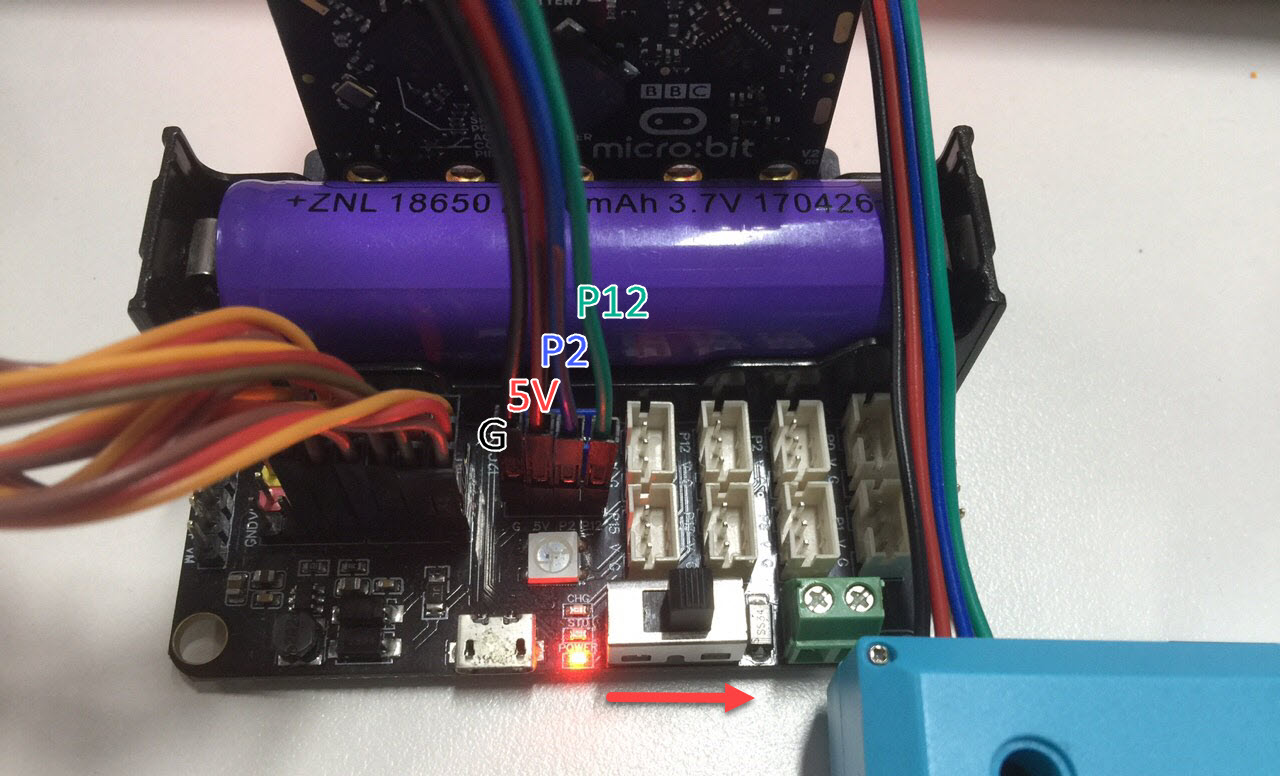
最后把4PIN端子头插到KOI接口上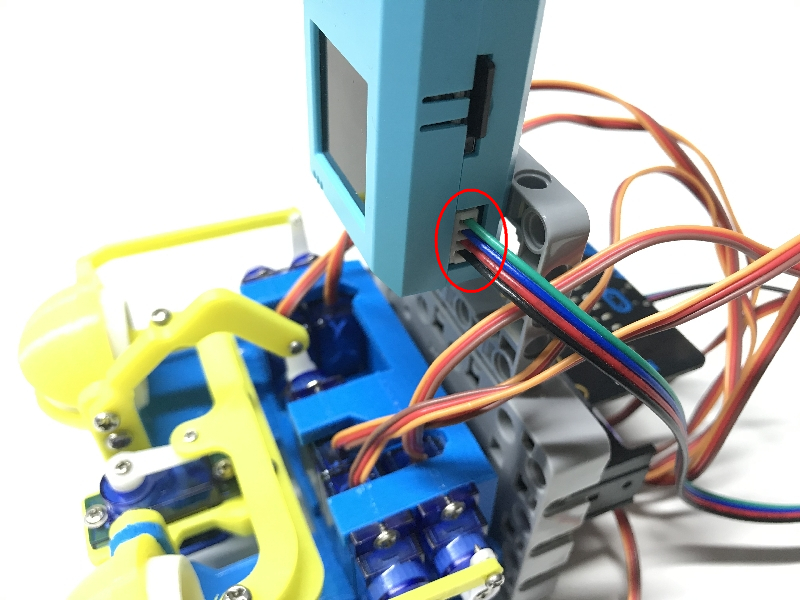
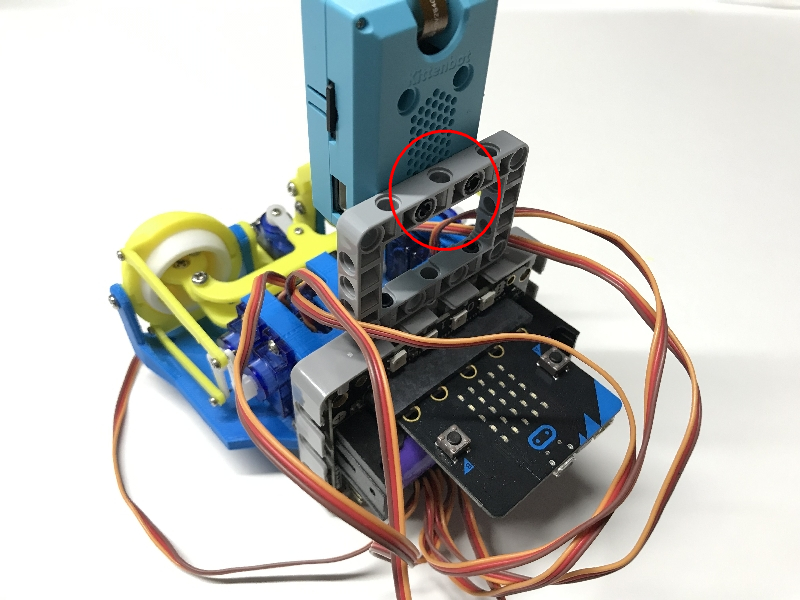
组合安装支架