2-软件调试
套件资料包,购买套件的用户请联系我们淘宝客服经理进行索取
本教程以MicrobitV2为例,在Kittenblock1.88下使用(程序包中也提供了Microbit V1.5的程序)
kittenblock使用
从此处下载软件安装包, https://www.kittenbot.cn/kittenblock
下载完毕后,双击下一步下一步进行默认安装(如果安装过程防火墙进行拦截,请允许)

双击打开软件
安装完毕,双击打开普通图标即可

连接Microbit
使用数据线连接Microbit和电脑,
如何区分Microbit的版本
需要根据版本选择打开不同的程序包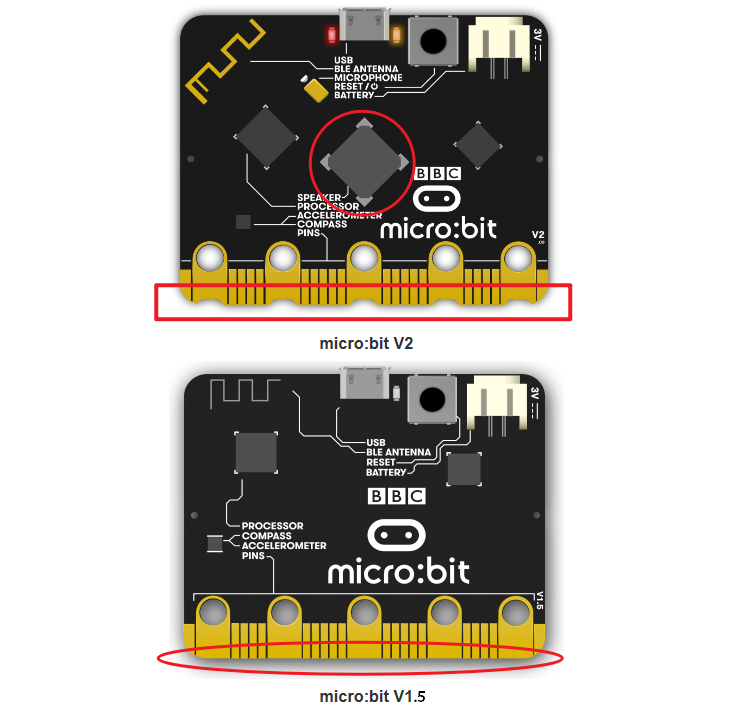
打开程序
将网盘中的程序包中,有两套程序Microbitv1.5 和 v2,请根据你收到的硬件进行选择。
这里以MicrobitV2为例。
将“02人脸追踪调试程序.sb3”拖到Kittenblock1.89中——加载。
或者在软件中,选择文件——打开本地文件,选择“02人脸追踪调试.sb3”
选择硬件
我的硬件是MicrobitV2,所以我选择的是“MicroBitV2 python”
如果你的硬件是Micorbitv1.5,那么对应选择的是“MicroBit Python”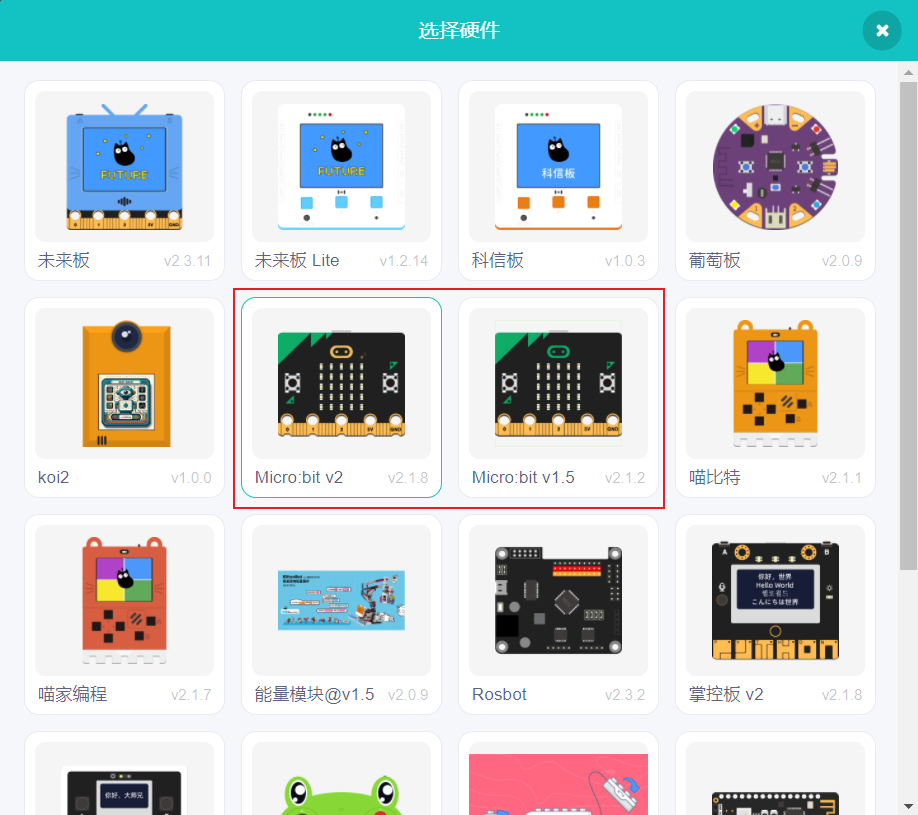
恢复固件
点击恢复固件按钮,稍等片刻,等待下载完毕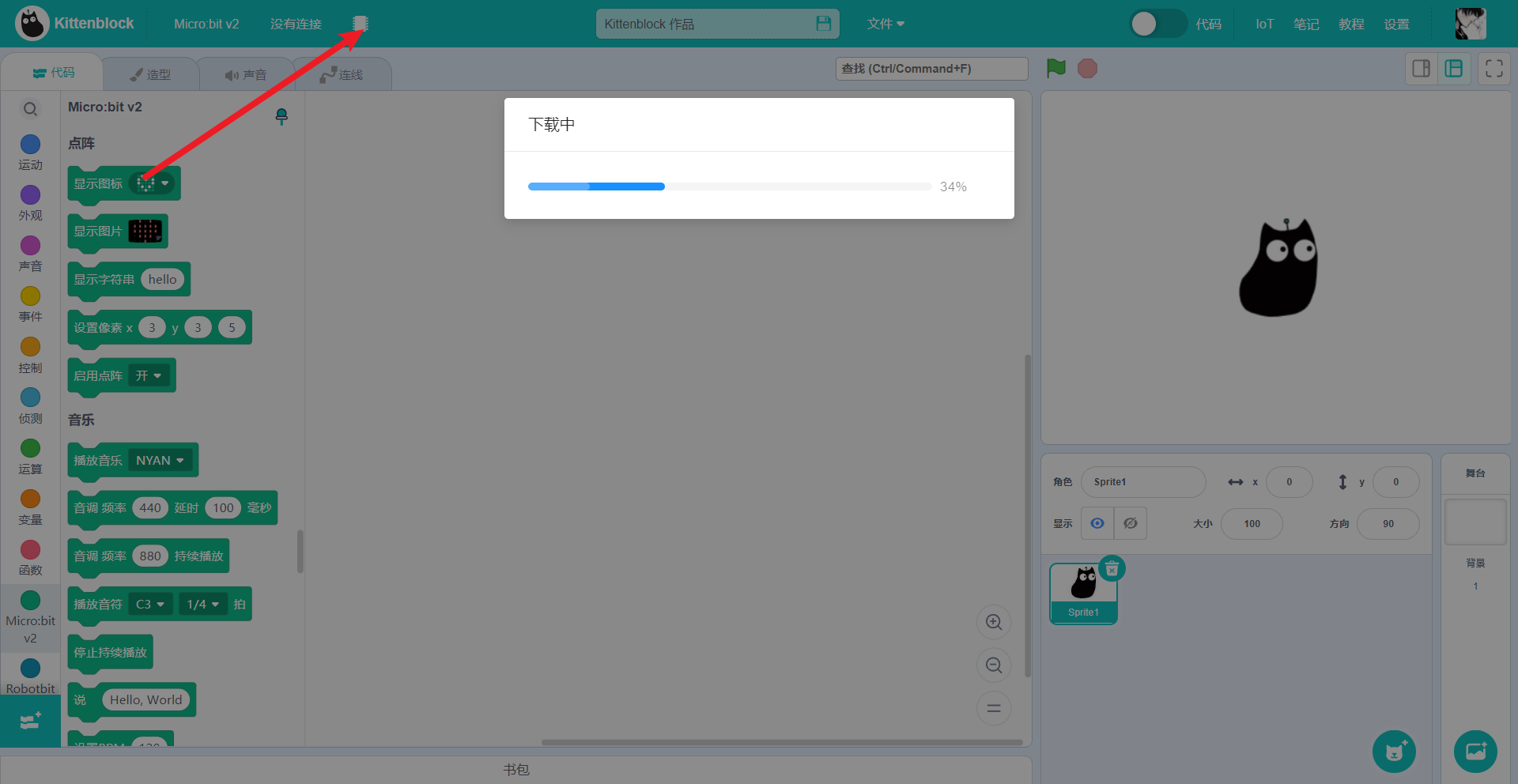
连接串口
如果找不到设备,请检查:
1、Microbit的USB数据线是否已经连接好电脑?
2、串口驱动是否根据前面的步骤安装完毕?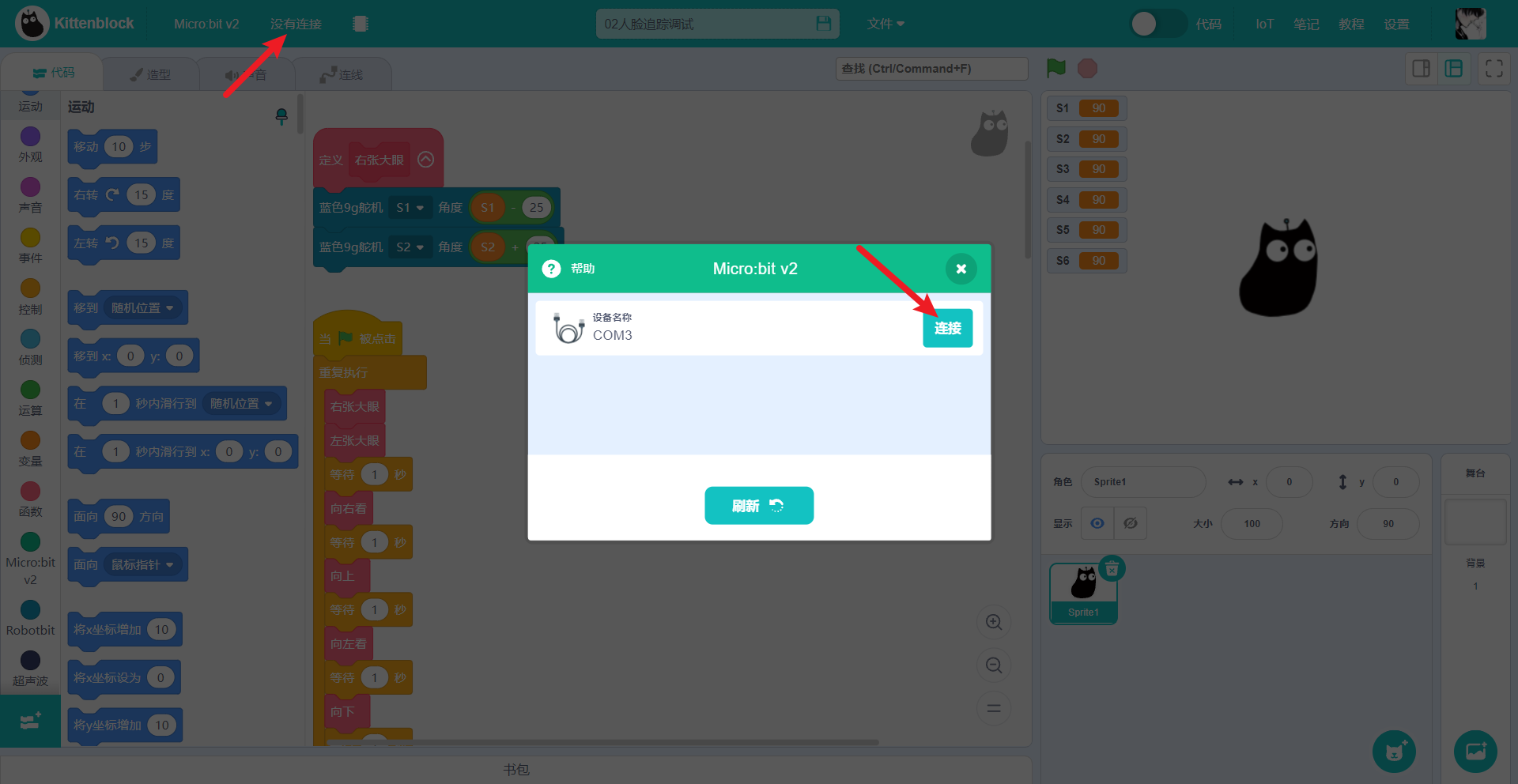
检查Robotbit
1、电池正负极已经正确安装——如图所示,正极在左边
2、舵机接线线序正确——如图所示,黄色线在上
3、Robotbit电源已经打开——如图所示,已经拨向绿色端子那边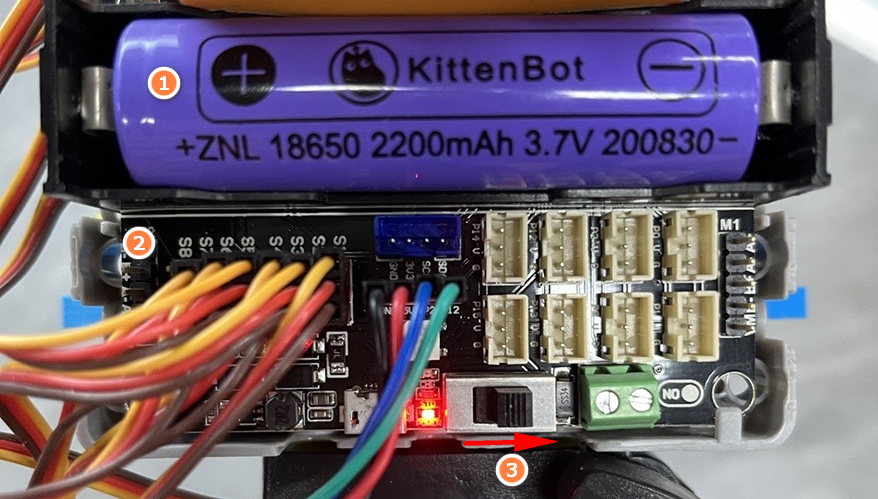
点击归位积木块
1、鼠标点击红色的“归位积木块”
2、点击后,6个舵机会停在90度的方向。但实际舵机的摇臂并不是真正的90度垂直,这时需要调整S1~S6的数值。
3、分别调整舵机(S1-S6)数值,每调整一次,就点击一次【归位】程序块(点击后舵机才会执行到新设置的位置)
4、如此循环调整,最终保证,实物舵机的白色摇臂实物接近垂直90度位置。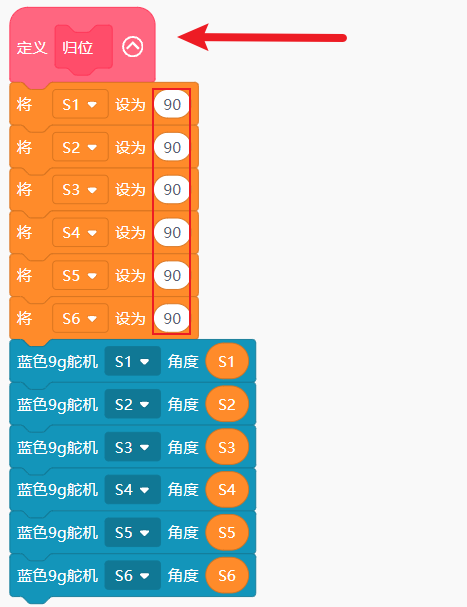
根据实物现象,这个是我调整后的S1~S6的角度(你的数值与我的数值不一样,根据实际进行调整)
如图,调整到这种程度即可(已经非常接近90度)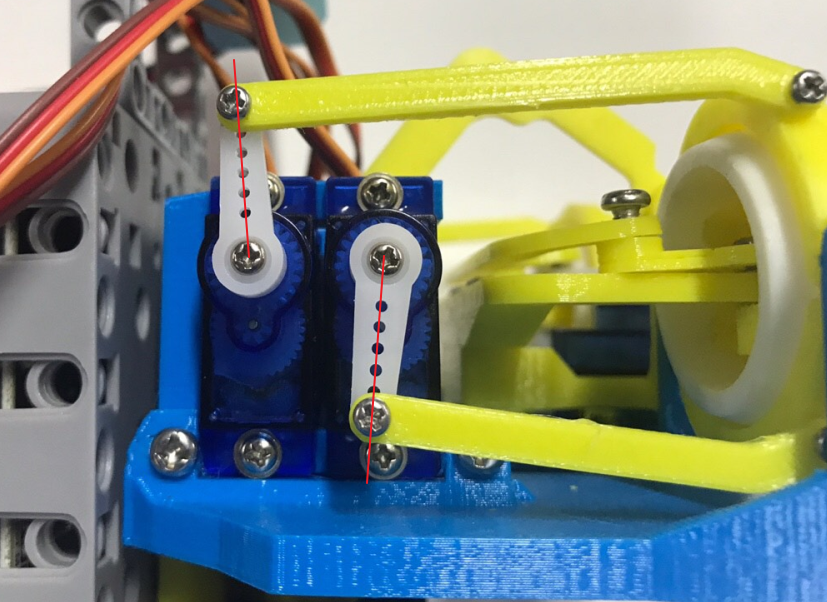
测试
1、根据以上的方法调整,点击绿旗子进行最终测试(如下图),检查眼皮眨眼,眼珠上下左右转动是否正常
2、确认无误,请记录S1~S6对应的6个数,最终程序中用到。记得保存程序,方便下次调试,保存完毕后可以关闭软件了。

makecode使用
在浏览器打开此链接:https://makecode.microbit.org/
把程序包中的hex拖拽到Makecode中,即打开程序。

修改S1-S6的数值
把上一步骤记录下的S1~S6数值,填入到如图所示的S1~S6中。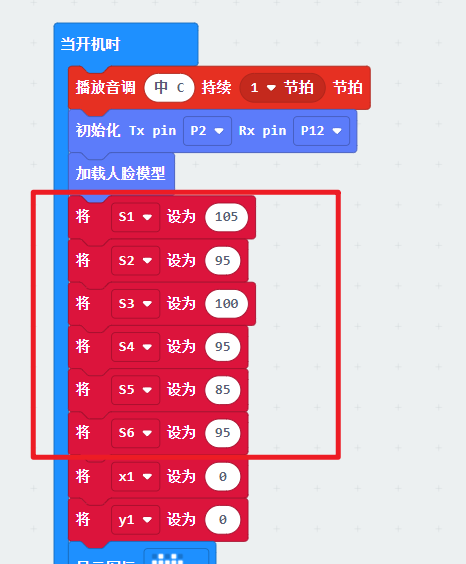
保存程序
点击保存按钮,把你调整过后的程序以另外的名称保存到电脑地方,例如桌面
复制你的程序
将你修改过的程序(XXX.hex),复制粘贴到 “Microbit”的U盘上。这样程序就下载好了。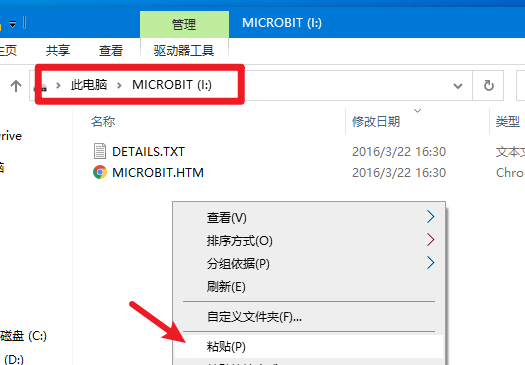
运行
因为Microbit+Robotbit+KOI+6个舵机耗电量比较大,因此把外部电源插上,我们提供了5V的电源插头,插到Robotbit充电口上
确保Robotbit的电源开关已经打开了
KOI的屏幕也亮起来的
这时再按Microbit背后的复位按键,让程序重新跑。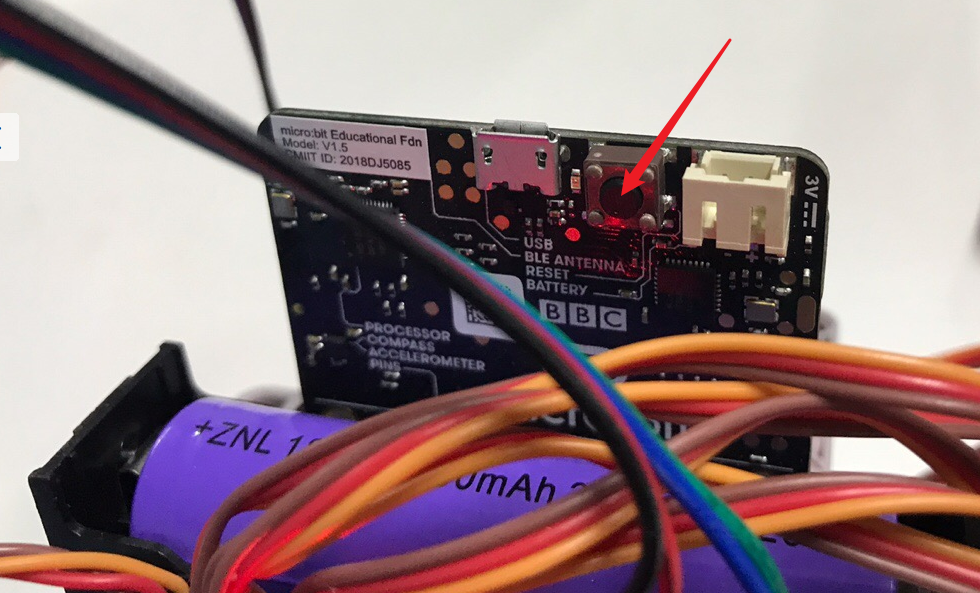
这时候我们人脸在KOI摄像头的检测范围呢,就会画出绿色的框了。
根据实际情况调整摄像头镜头的上下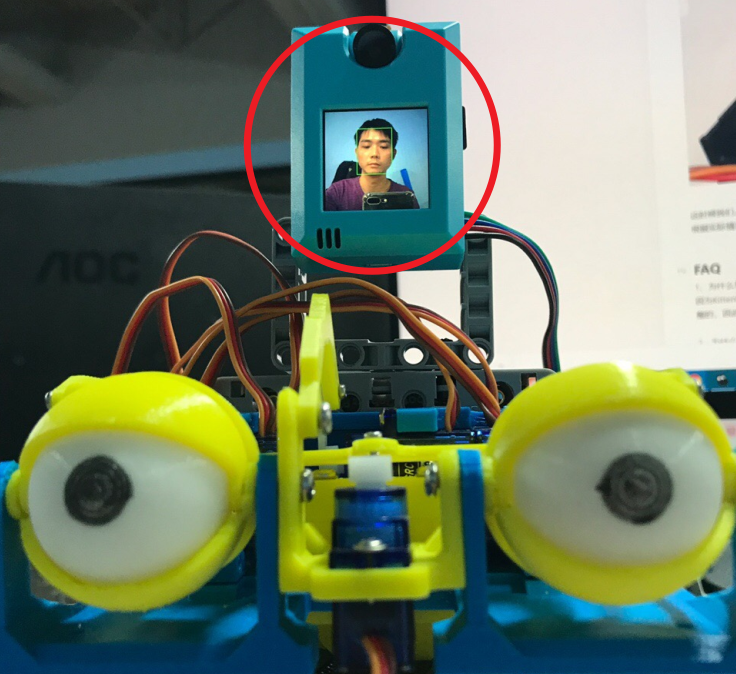
常见问题与解答(FAQ)
1、为什么软件既用了Kittenblock,又用Makecode呢?
因为Kittenblock中,具有实时模式,不用下载程序,就可调整舵机的角度,调整舵机的角度是需要多次进行调整的,因此用Kittenblock更方便,节省你的时间。
2、为什么要按Microbit的复位按键才能后才能人脸追踪?
因为上电的一瞬间,Microbit已经把控制KOI的通讯指令已经发了,但是这时KOI还处于开机状态中,等KOI完全亮起屏幕后,这时复位Microbit让它重新发送控制KOI的通讯指令。
3、感觉眼睛睁不大?
可以调整S1、S2(右眼),S3、S4的数值。调整完毕后,再把调试好的数值记录下来,填入Makecode端的程序,最后下载到Microbit上,重新运行程序。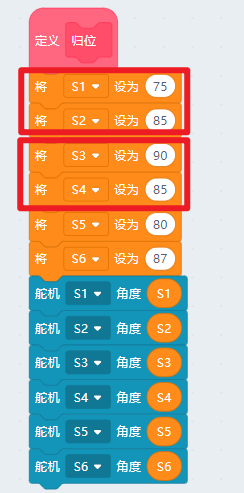
4、可以不插5V电源供电吗?
可以,但18650电池需要给这么多器件供电,一般能坚持15~25分钟左右,如果做展示使用,请插上5V电源,给robotbit的电源口进行供电。