08-Robotbit使用
加载microbit硬件的时候,其中Robotbit分栏也会一同出现,Robotbit指的是Microbit的一块高性能扩展板 (Microbit本身的驱动能力很弱,而搭配Robotbit使用,可驱动至少8路舵机,以及4路直流电机或2路步进电机)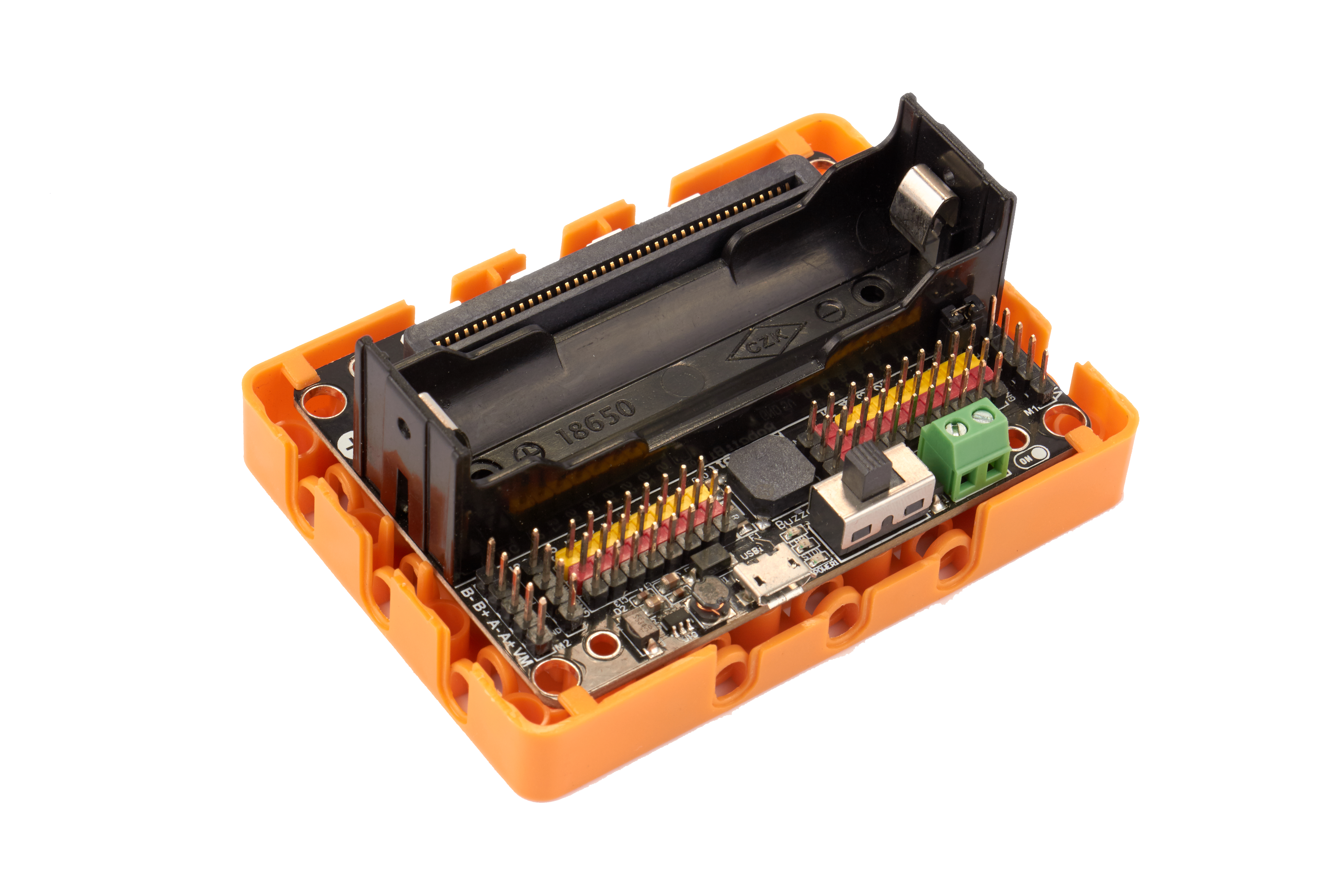
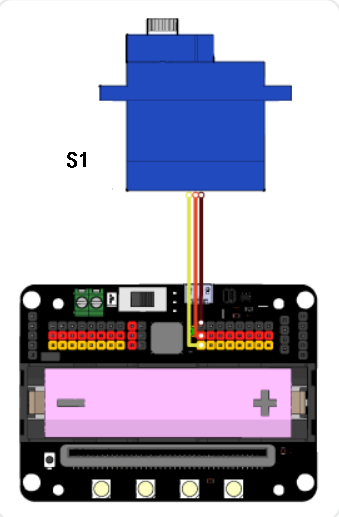
拓展版图片
Robotbit图形块介绍
| 积木块 | 功能 |
|---|---|
 | 电机调速(-255~255)负数为反转 |
 | 设置电机以某速度运转一定时间 |
 | 停止电机,可单独停止 |
 | 所有电机停止 |
 | 普通蓝色9g舵机,范围0~180° |
 | 喵家GeekServo 9g舵机,范围0~360° |
 | 喵家2KG舵机,范围0~360°(可停角度) |
 | 步进电机控制 |
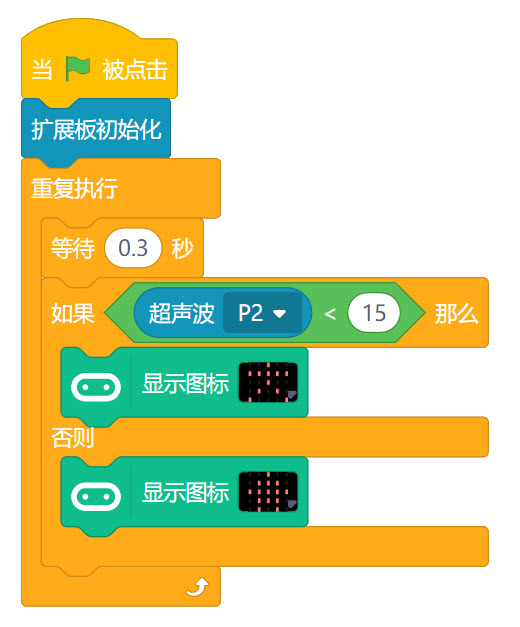
 | 猫头超声波测距离(厘米)默认串口p0 |
案例程序
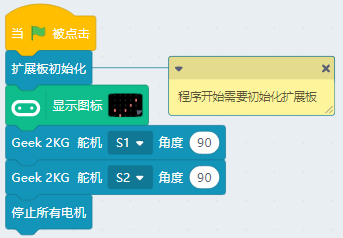
- 舵机的角度使用
危险
注意:在程序开始的时候要添加扩展板初始化的积木块
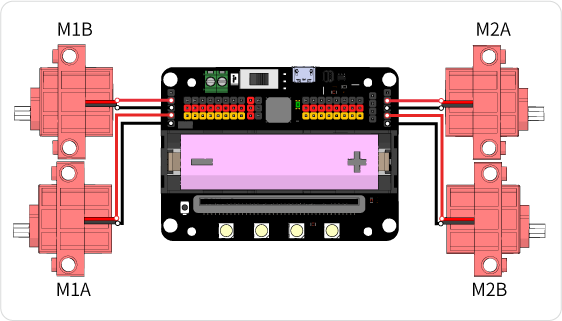
📋:驱动电机

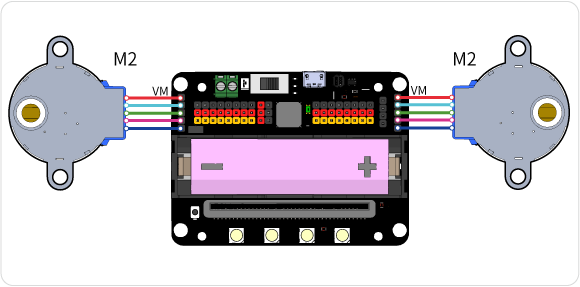
📋:驱动步进电机

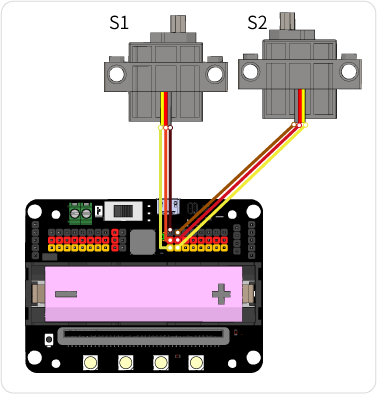
📋:驱动geekservo 9g舵机

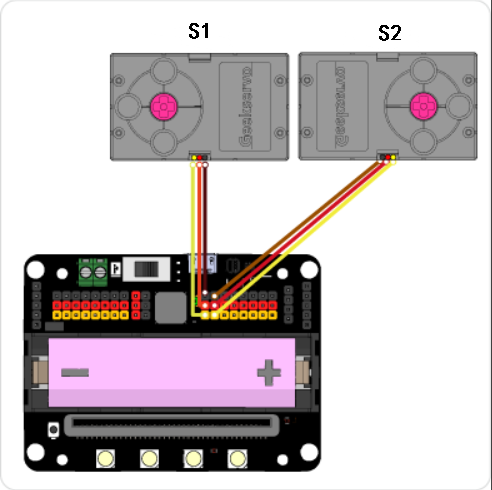
📋:驱动geekservo 2kg舵机

📋:驱动普通蓝色9g舵机

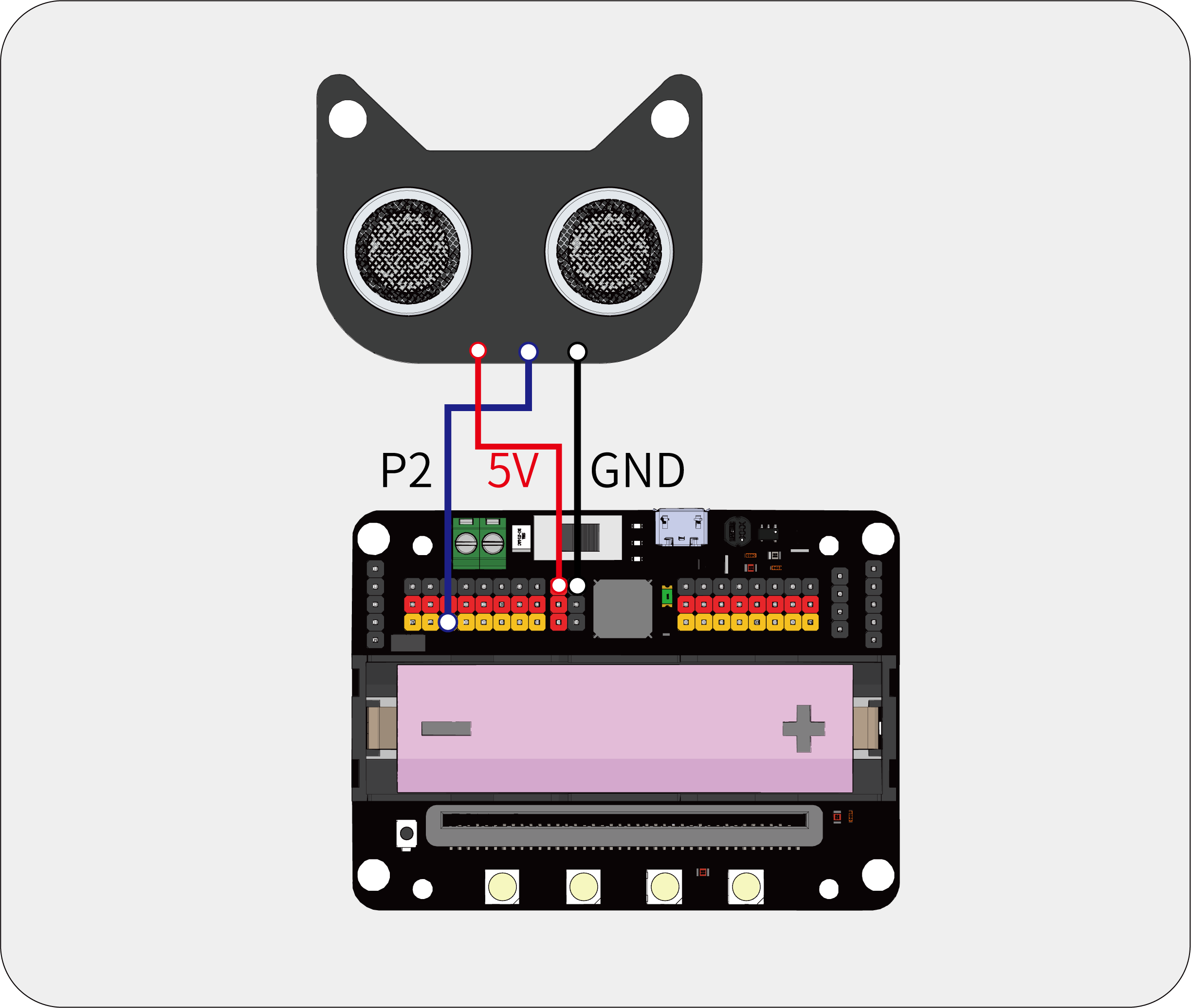
📋:连接猫头超声波